
Les derniers contenus liés aux tags Nvidia et GDC 2016
GDC: D3D12, multi-GPU et frame pipelining
GDC: VR: Nvidia Multi-Res Shading en pratique
GDC: Vers de nouveaux types de shaders ?
GDC: Async Compute : ce qu'en dit Nvidia
GDC: Nvidia lance le SDK GameWorks 3.1
GDC: D3D12, multi-GPU et frame pipelining



Lors de la journée de la GDC consacrée aux tutoriaux liés à DirectX 12, organisée par AMD et Nvidia, c'est ce dernier qui s'est chargé de présenter la partie multi-GPU et de distiller des conseils d'utilisation réalistes pour le nouveau mode explicite. Les combinaisons exotiques laissées de côté, c'est le frame pipelining sur base d'une configuration de GPU identiques qui est mis en avant.
L'an passé, Microsoft a annoncé avoir intégré à DirectX 12 un support explicite très flexible pour le multi-GPU. Pour rappel, la nouvelle API conserve tout d'abord un mode implicite, similaire au SLI et CrossFire sous DirectX 11. Avec ce mode les pilotes sont censés se charger en toute transparence de donner vie au multi-GPU via le mode AFR.
Mais comme l'explique Nvidia, entre la théorie et la pratique il y a un gouffre et dans de plus en plus de cas le multi-GPU ne fonctionne pas, ou avec de très faibles performances, notamment quand des techniques de rendu dites "temporelles" sont exploitées. Celles-ci englobent toute approche qui a besoin de données issues d'images précédentes pour en calculer une nouvelle, par exemple certains filtres d'antialiasing. Vu que ces images précédentes ont été calculées par un autre GPU, ces données ne sont pas facilement accessibles.
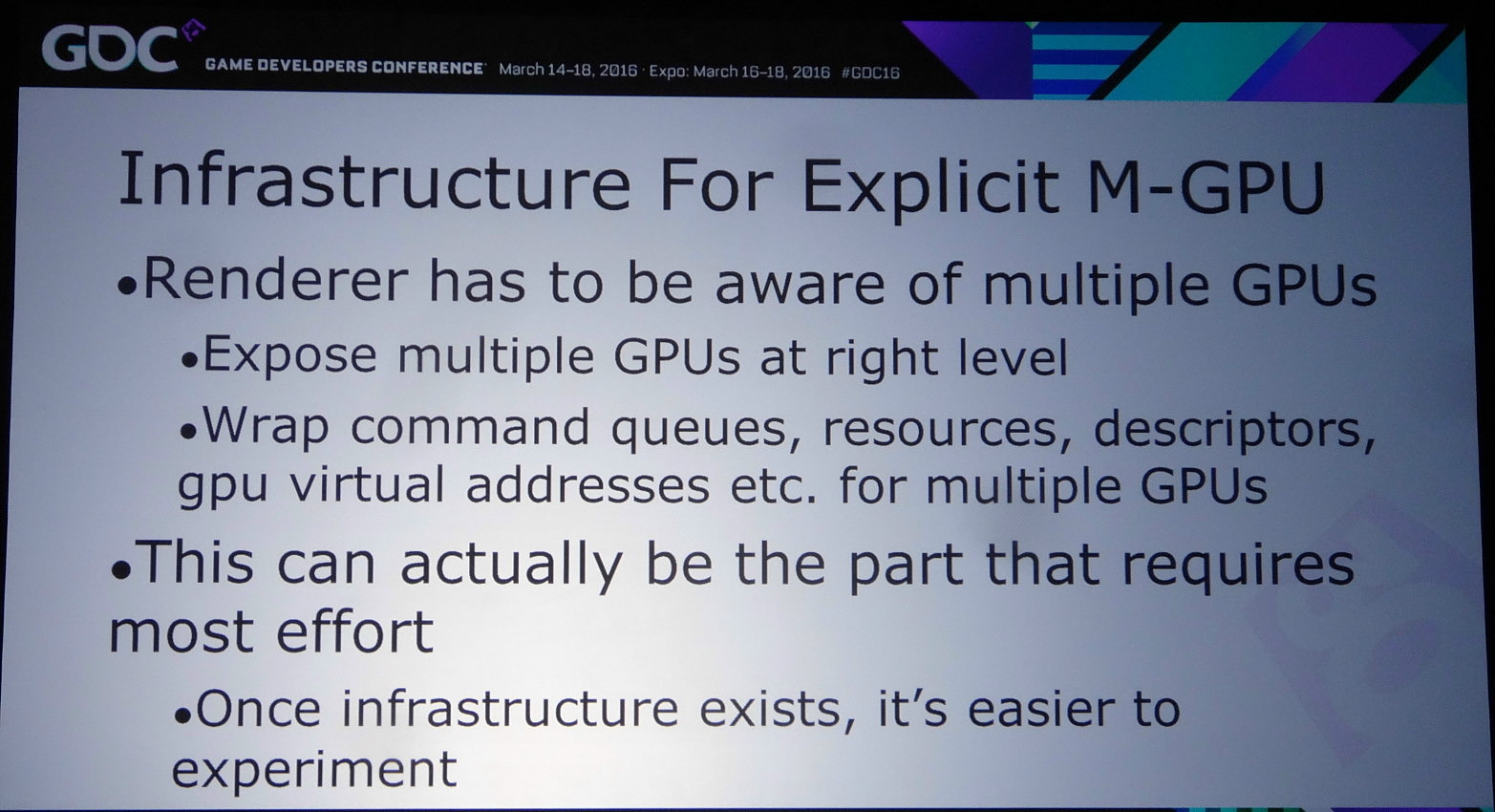
Pour résoudre ce type de problème, et bien d'autres, DirectX 12 supporte une gestion explicite du multi-GPU. Cette fois il ne fonctionne plus automatiquement et il revient aux développeurs de prévoir leur moteur pour qu'il prenne conscience du nombre de GPU et les contrôle explicitement. Plusieurs possibilités existent alors.
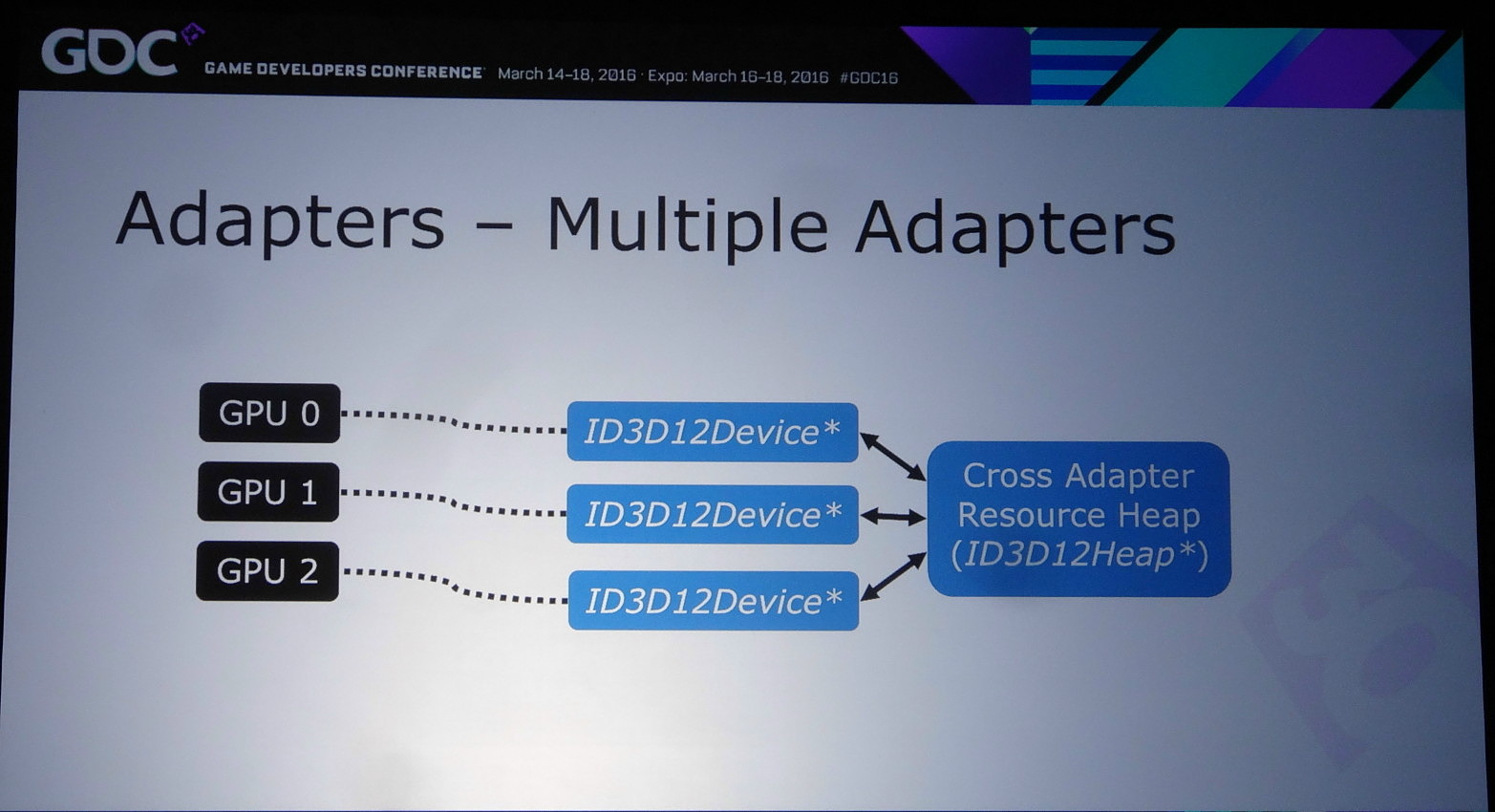
Celle qui a fait le plus parler d'elle est le mode explicite non-lié (unlinked) qui permet d'associer tout type de GPU, de marques différentes, de génération différente et de niveau de performances différent. C'est le mode qu'a choisi d'implémenter Oxide dans Ashes of the Singularity, probablement pour pousser le plus loin possible ses expérimentations avec la nouvelle API, mais ce n'est pas celui qui va intéresser la majorité des développeurs, celui-ci impliquant la prise en compte de trop nombreuses combinaisons. Le multi-GPU est une niche du marché PC, ce qui implique que ce n'est pas sur ce point que les développeurs veulent investir le plus de temps en implémentation et en validation.
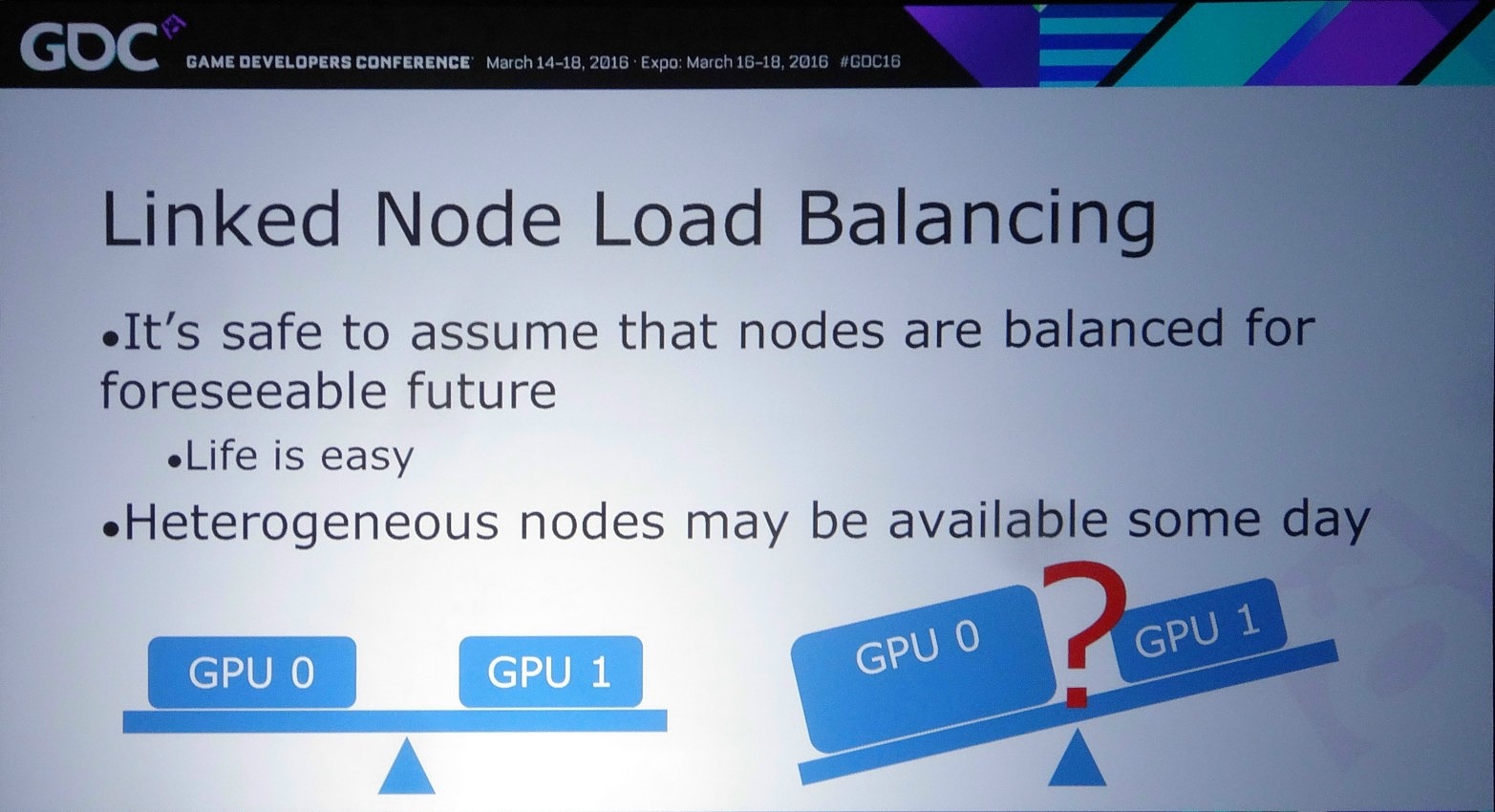
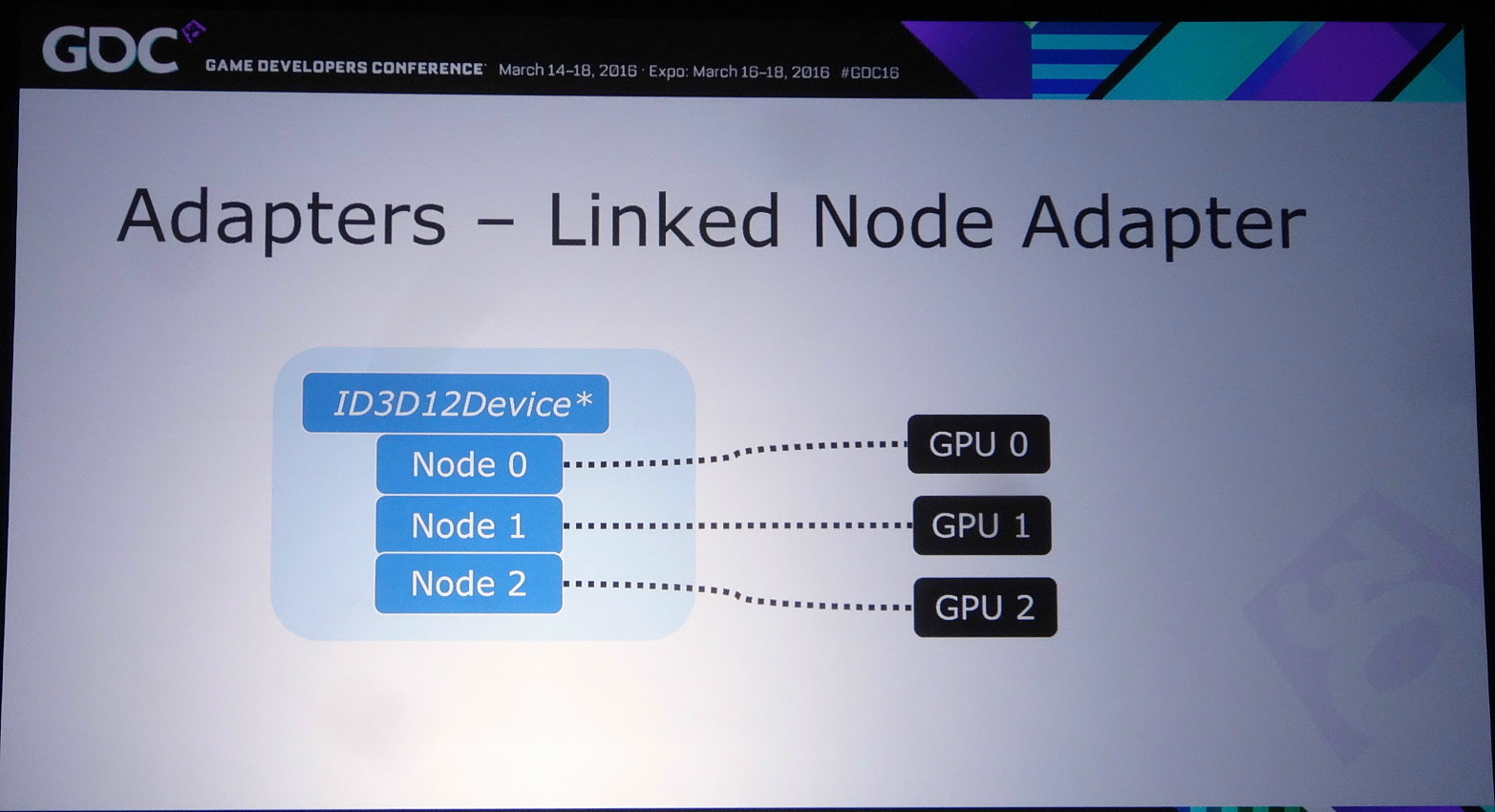
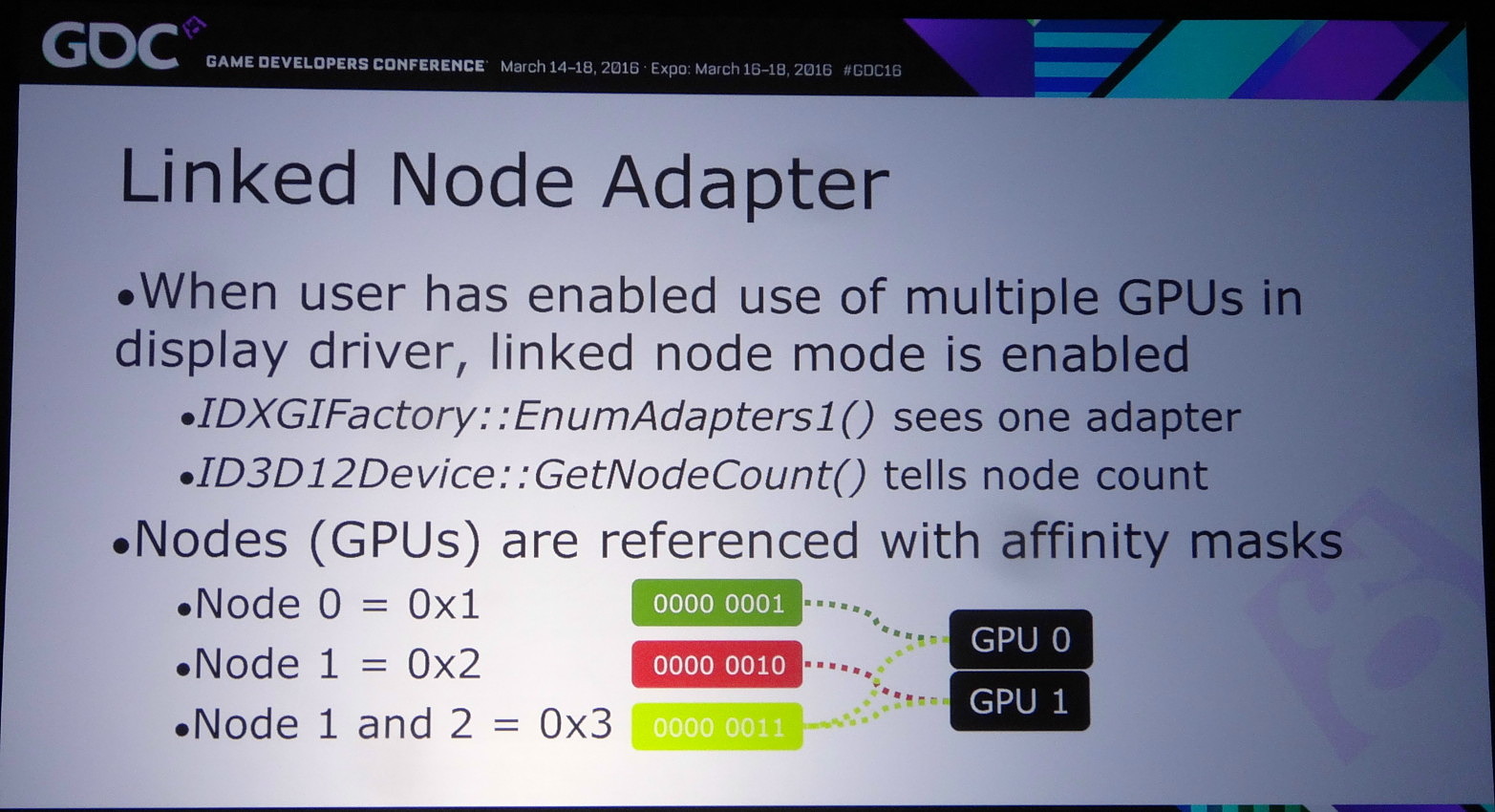
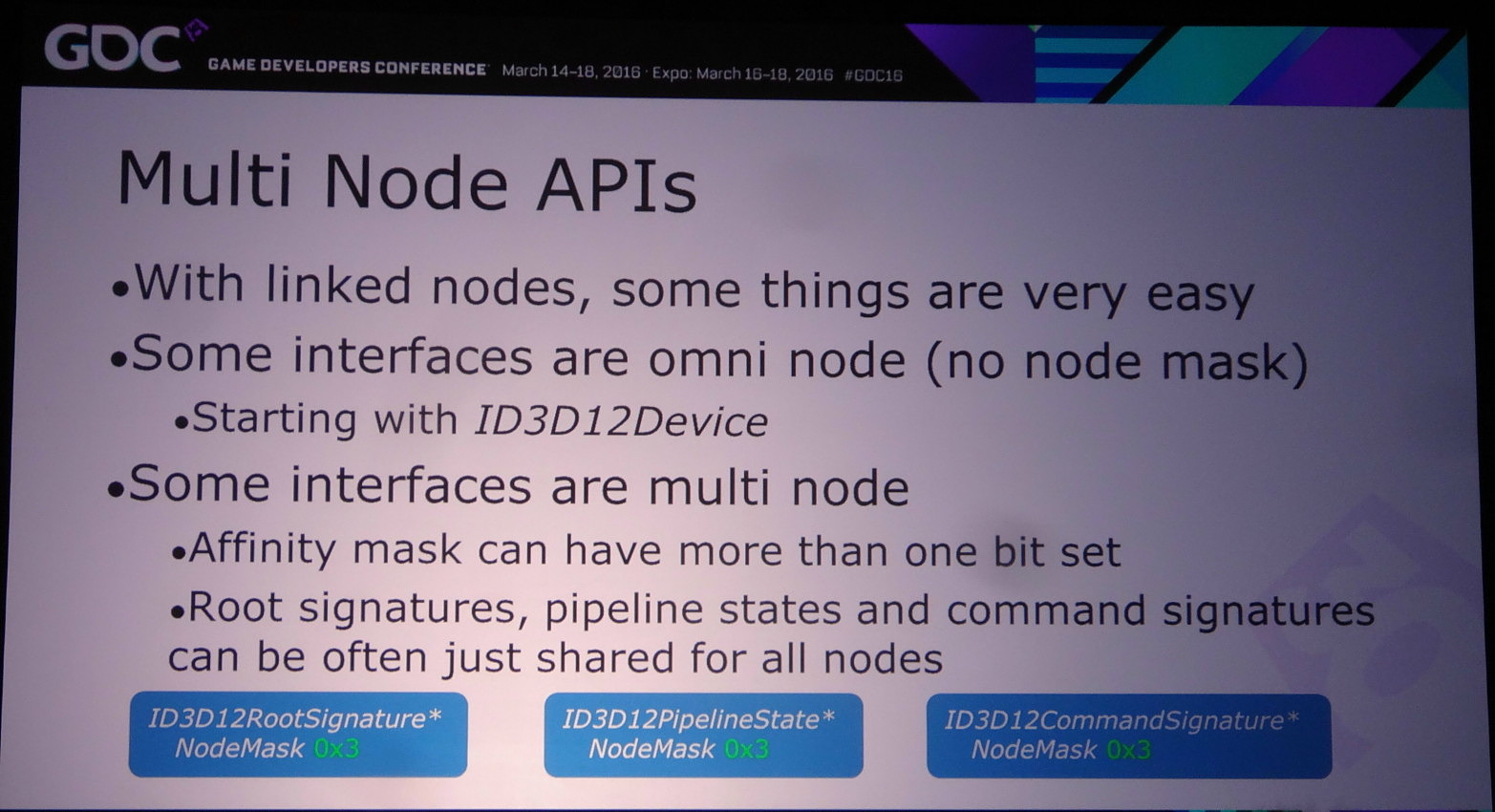
Reste alors le mode explicite à noeud lié (linked node), un noeud représentant un ensemble de GPU activé au niveau des pilotes. Autant AMD que Nvidia exposent un tel noeud dès que le CrossFire ou le SLI sont enclenchés dans leurs panneaux de contrôle. Attention, cela ne veut pas dire que le multi-GPU fonctionnera automatiquement ! Tout le contrôle reste dans les mains des développeurs mais ils ont alors l'assurance d'avoir affaire à des GPU identiques ou similaires, ce qui simplifie leur travail. Tout du moins pour le moment puisqu'il n'est pas impensable qu'AMD et Nvidia autorisent des noeuds hétérogènes dans le futur.
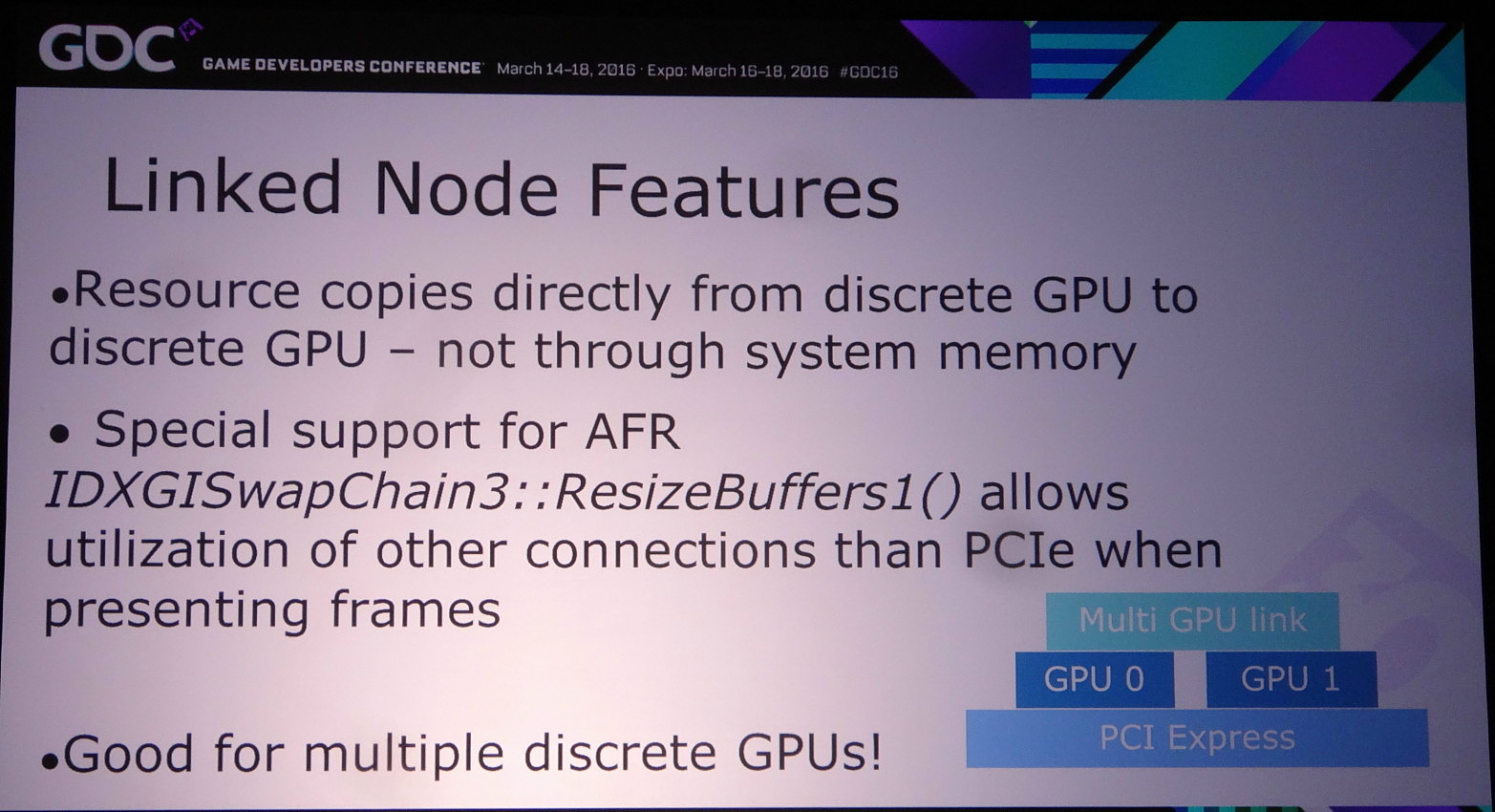
Ce mode explicite lié donne également accès à un lien dédié éventuel, soit au point SLI dans le cas des GPU Nvidia, AMD ayant abandonné le lien CrossFire au profit exclusif du PCI Express. Cet accès spécial n'est cependant exploité que si le multi-GPU implémenté est de type AFR. Le reste des transferts se fait via le bus PCI Express mais directement de GPU à GPU.
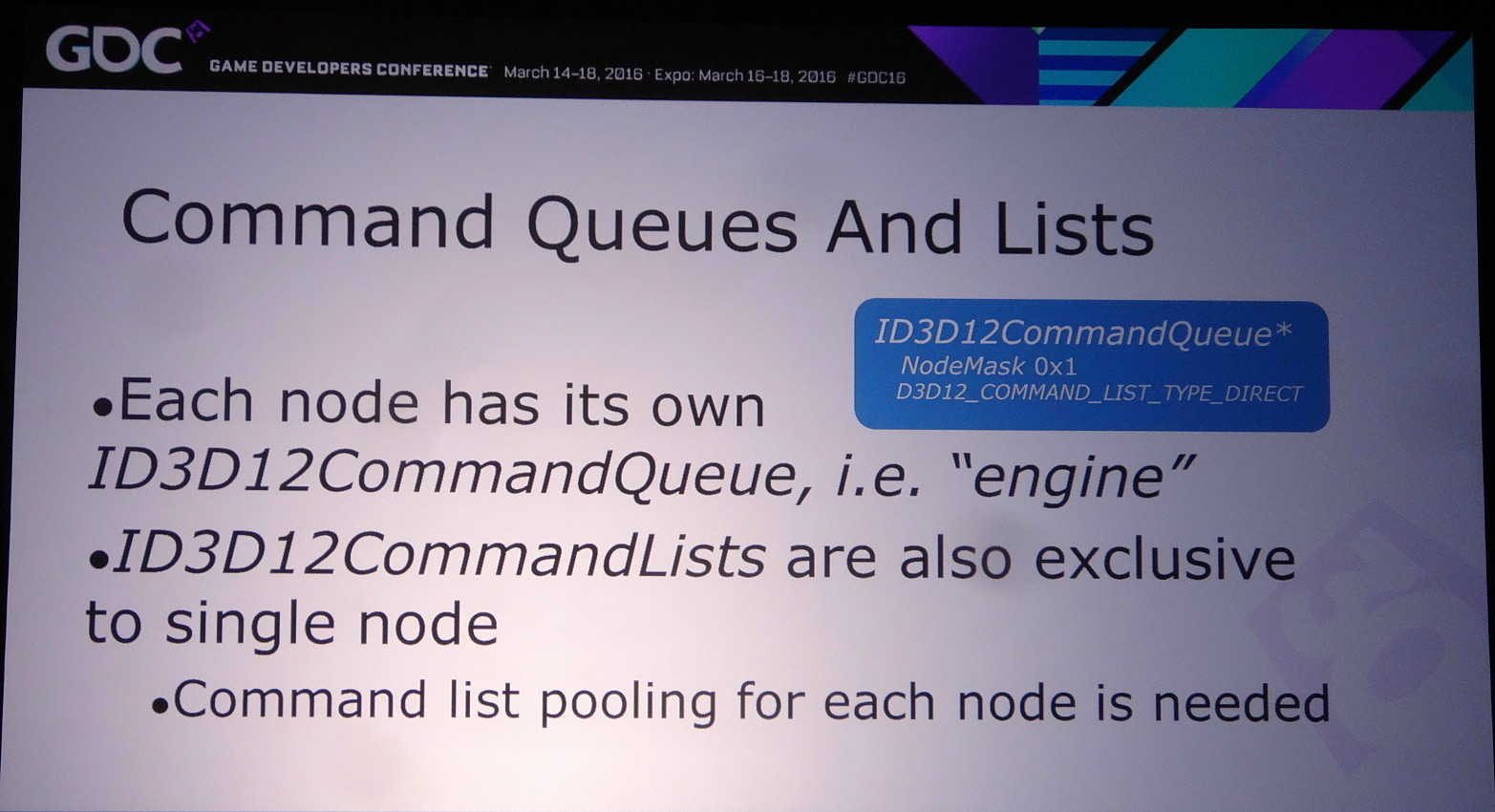
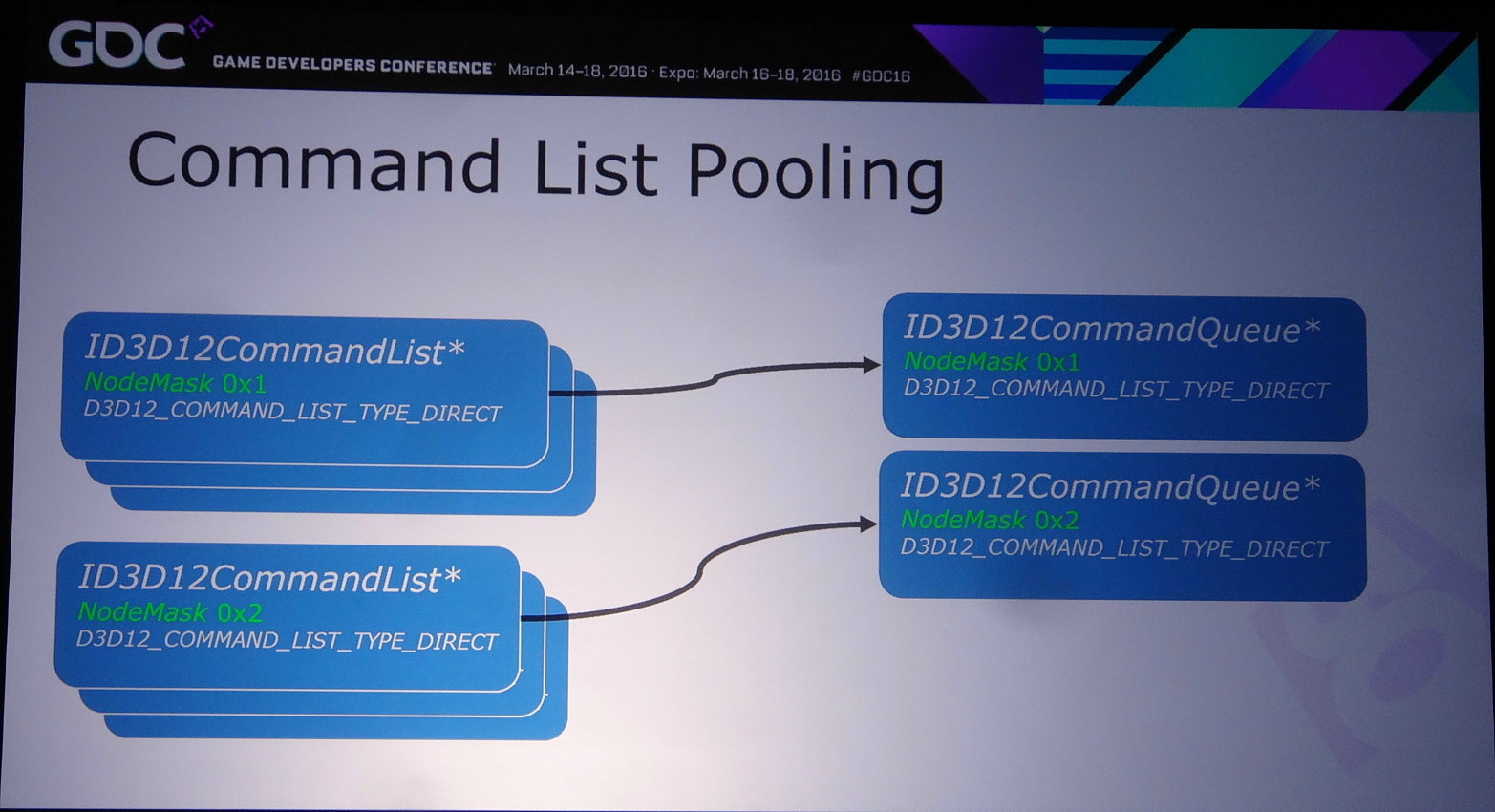
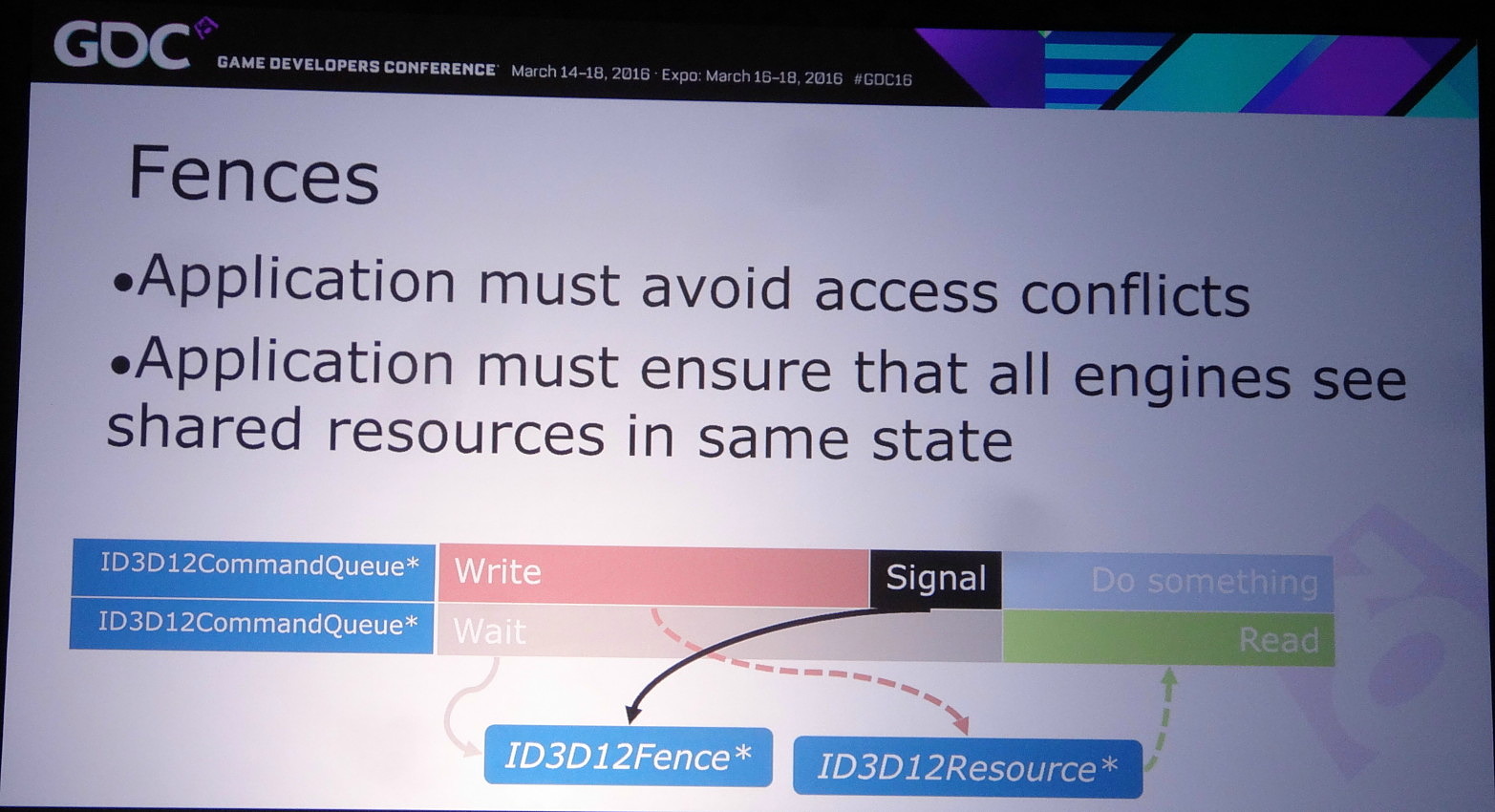
Les développeurs pilotent le multi-GPU à travers le multi engine, cette même fonctionnalité présente au coeur de DirectX 12 et qui permet de booster les performances à travers l'exécution concomitante de files de commandes (Async Compute). Il suffit de dédoubler la ou les files de commandes pour alimenter deux GPU.

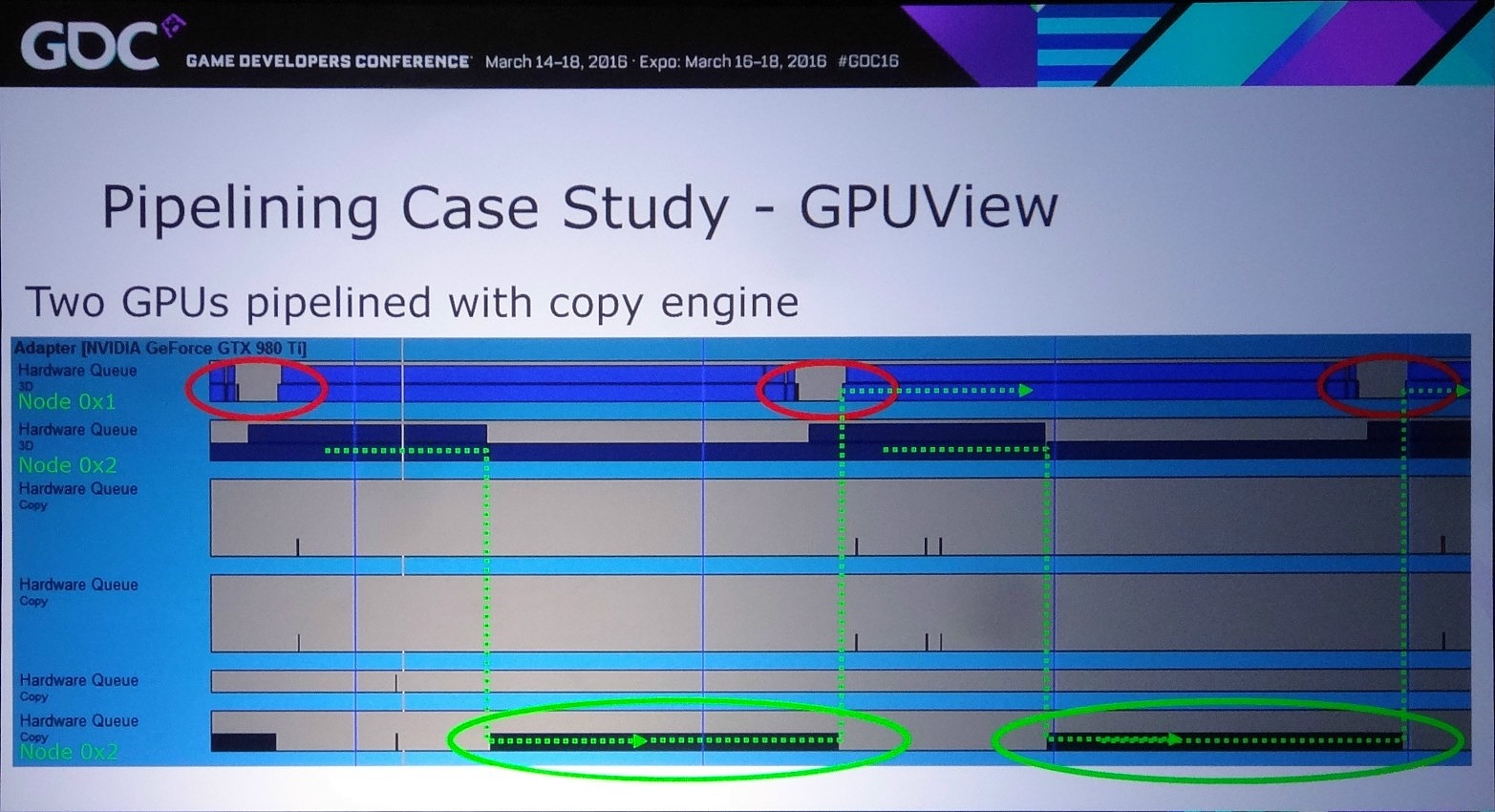
D'ailleurs, pour maximiser les performances, il est important d'avoir recours à une file dédiée de type copy pour organiser les transferts entre GPU. De quoi effectuer ces opérations en parallèle du rendu 3D et en masquer le coût. Si les GPU Nvidia ont du mal avec les files graphics et compute, ils n'ont par contre pas de problème pour traiter simultanément des files graphics et copy, tout du moins dans le cas des GPU Maxwell 2 qui disposent de deux moteurs de transferts DMA. A ce point, nous ne savons pas si les GPU précédents qui s'en contentent d'un seul pourraient être affectés.
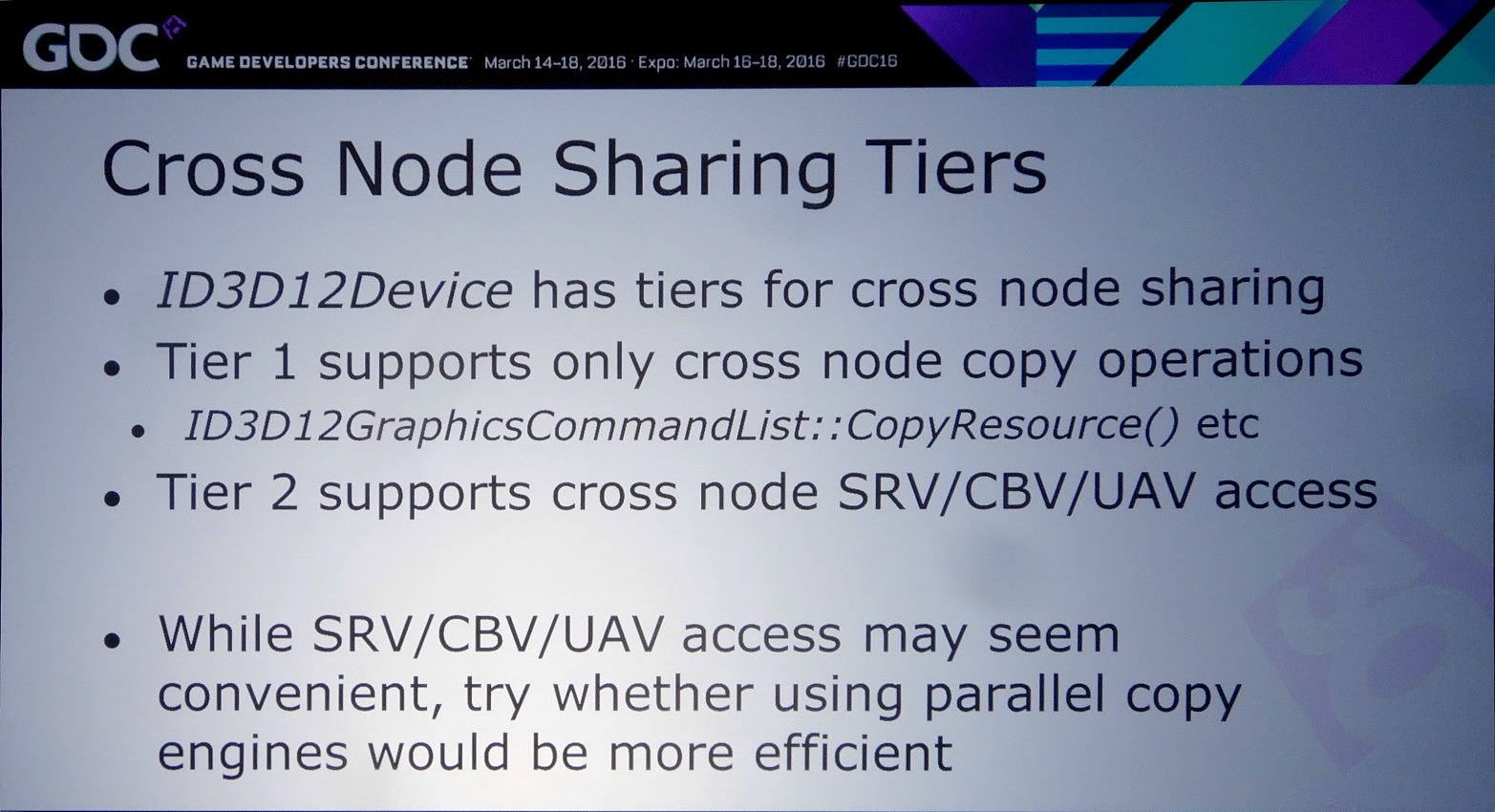
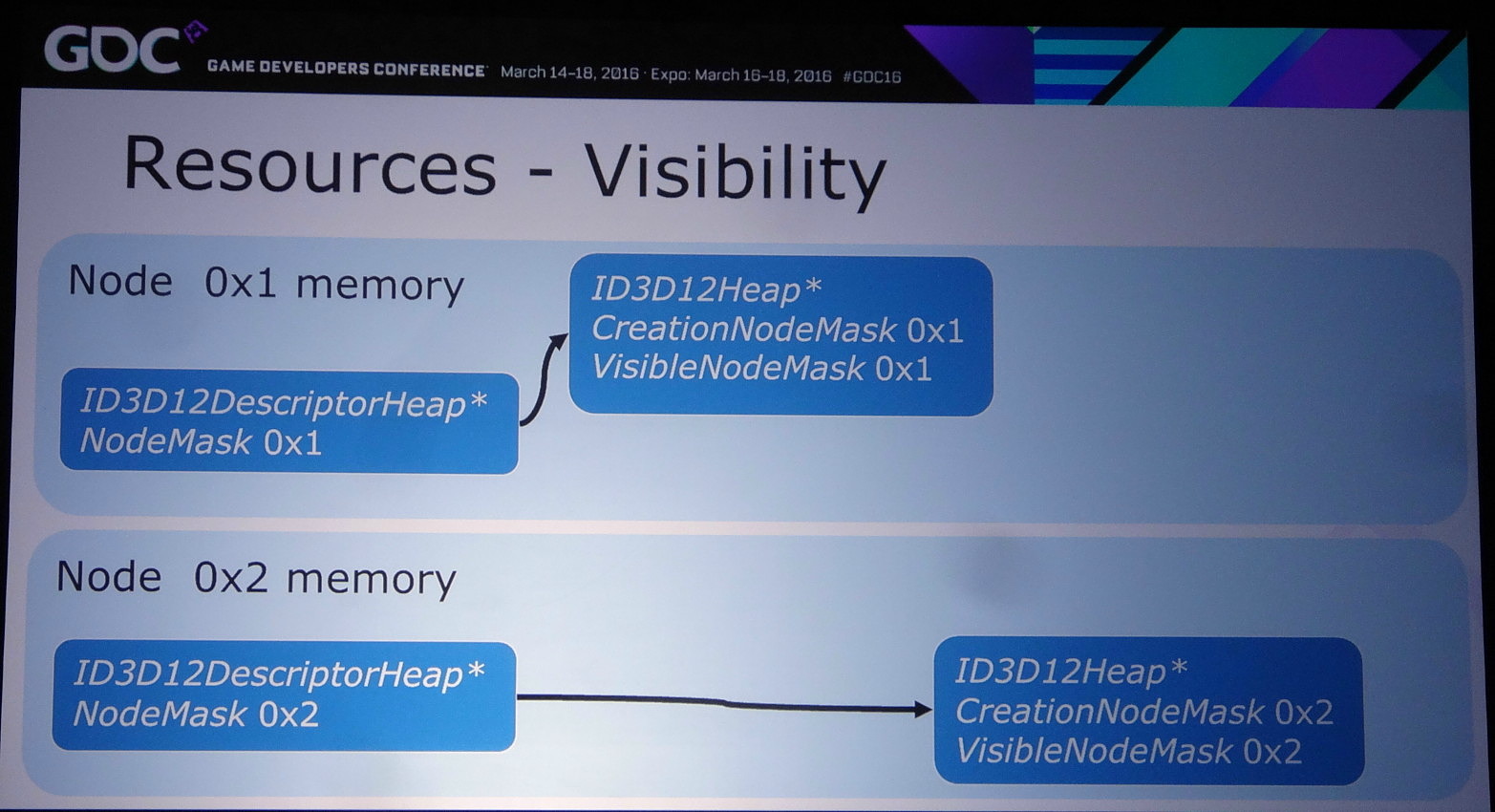
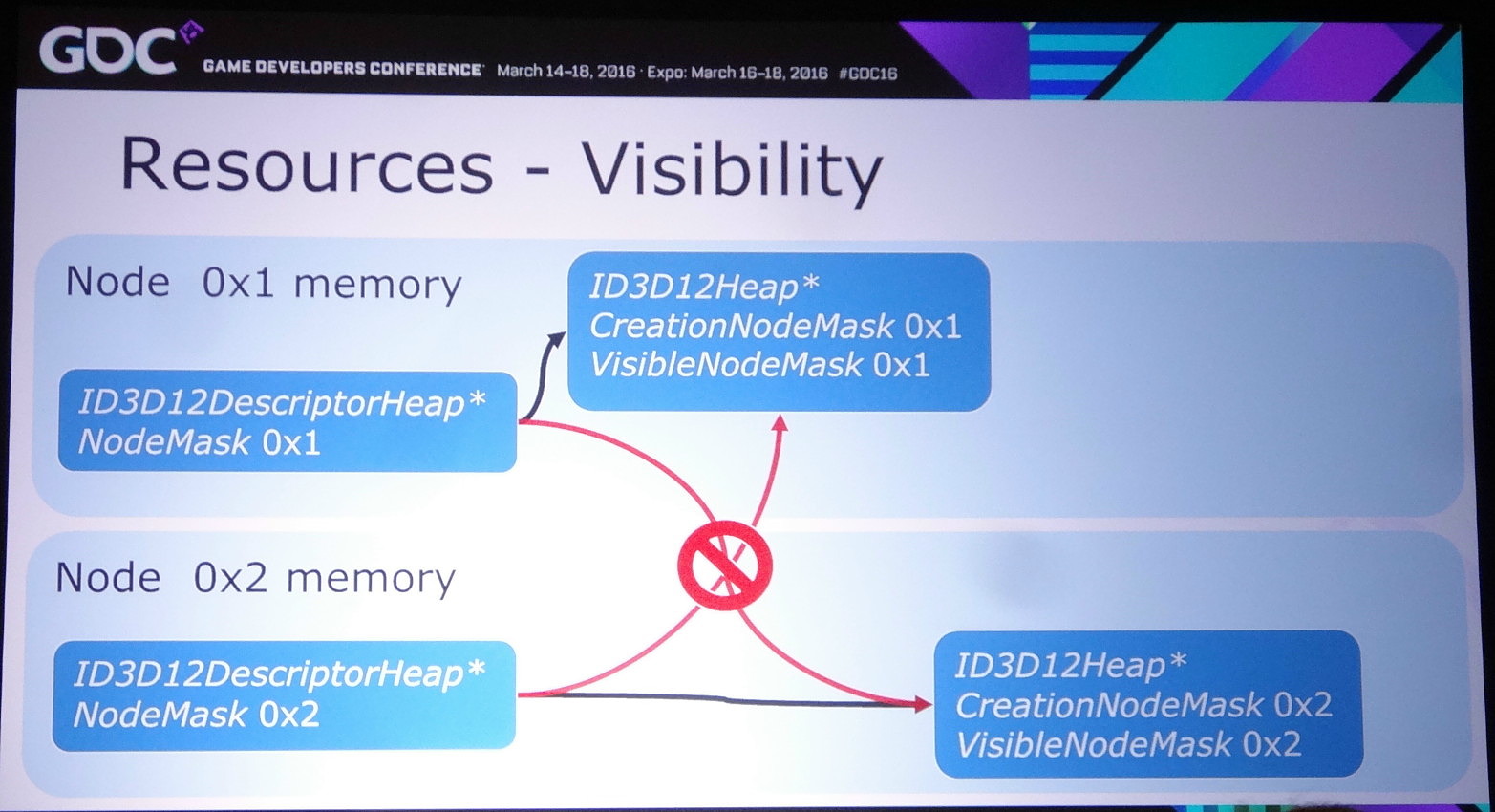
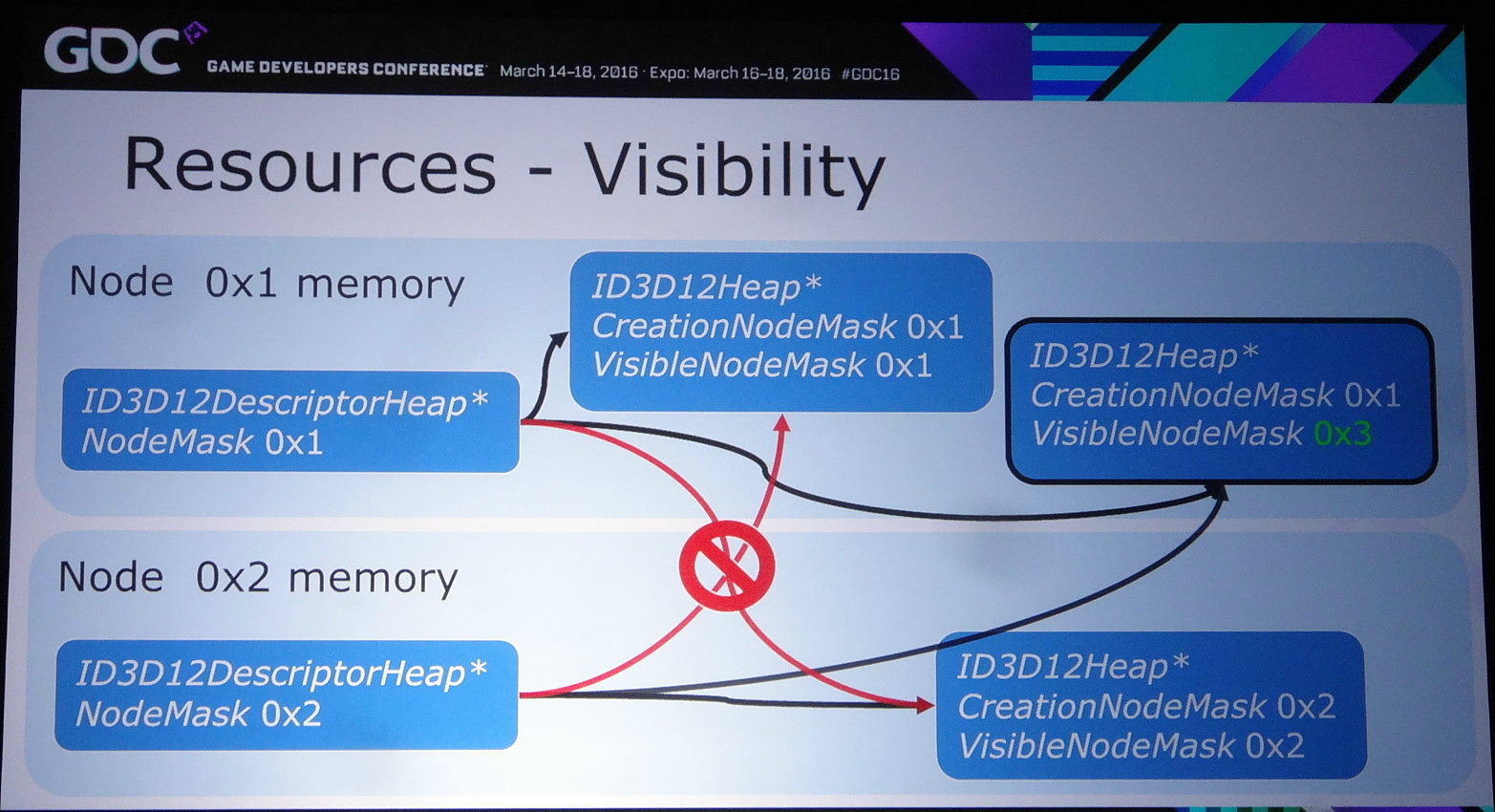
Nvidia rappelle ensuite qu'il existe différents tiers pour le partage de ressources à l'intérieur d'un noeud. Ce niveau de support est exposé à travers D3D12_CROSS_NODE_SHARING_TIER. Deux niveaux sont possibles : le tiers 1 ne supporte que les copies entre GPU alors que le tiers 2 autorise les accès à certaines ressources présentes dans la mémoire d'un autre GPU. Un dernier mode, le tiers 1 émulé est également proposé et consiste à implémenter dans les pilotes un mécanisme de transfert lorsque la copie directe de GPU à GPU n'est pas supportée.
Nous avons vérifié rapidement quel était le niveau de support proposé par AMD et Nvidia. Sur les GeForce Maxwell 2 il est de type tiers 2 alors qu'AMD se contente du tiers 1 sur GCN 1.1 et 1.2 (Hawaii et Fiji). Nvidia précise cependant que si les accès autorisés par le tiers 2 peuvent sembler pratiques, dans bien des cas il sera plus efficace d'effectuer une copie complète et de se contenter des fonctions du tiers 1.
Si exploiter le mode explicite lié peut permettre de faire de l'AFR (alternate frame rendering) avec un peu plus de flexibilité qu'en mode implicite, son intérêt réside surtout dans la possibilité d'implémenter d'autres modes de rendu, notamment pour résoudre les problèmes liés aux techniques qui font appel à une composante temporelle.
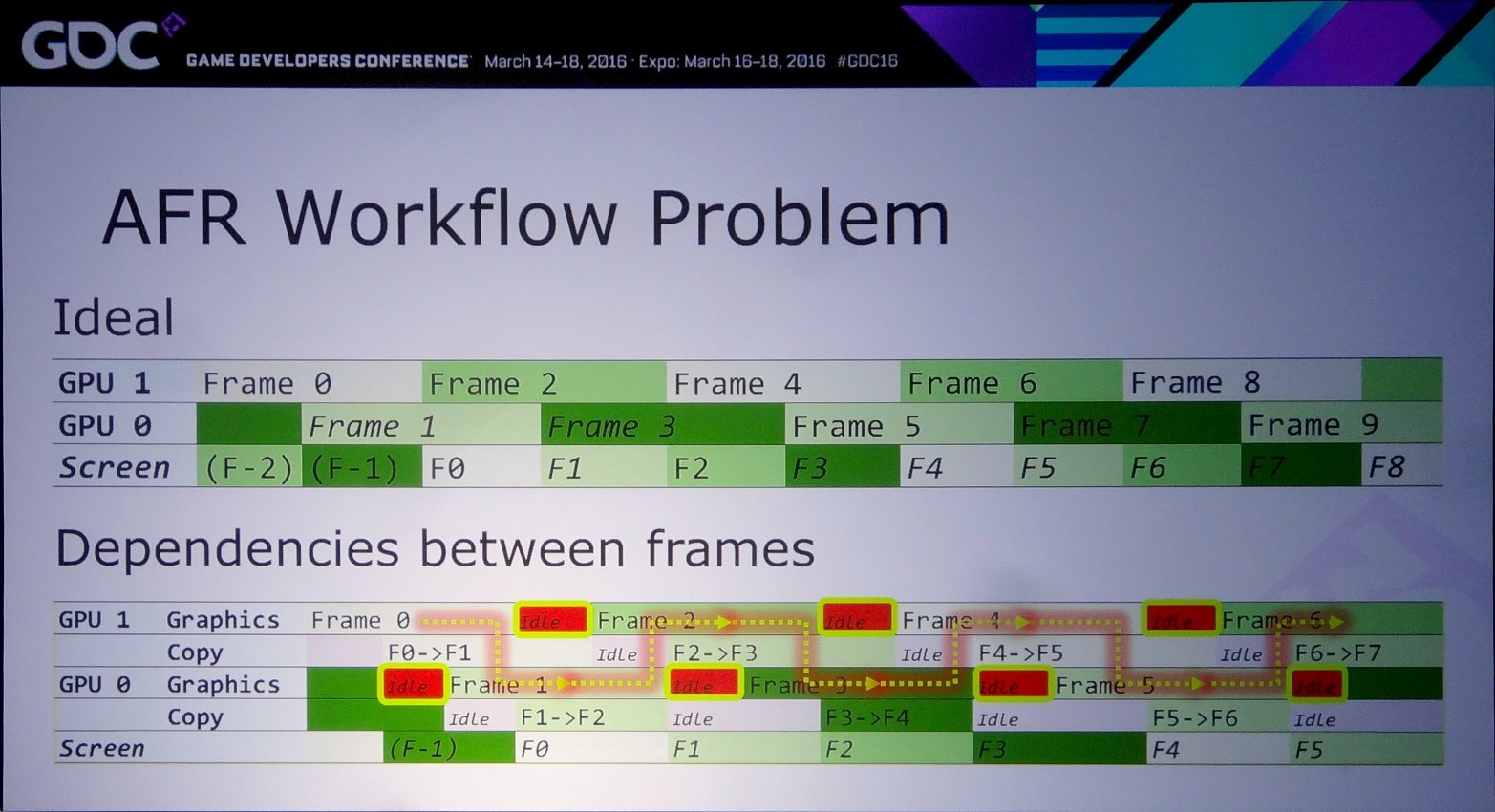
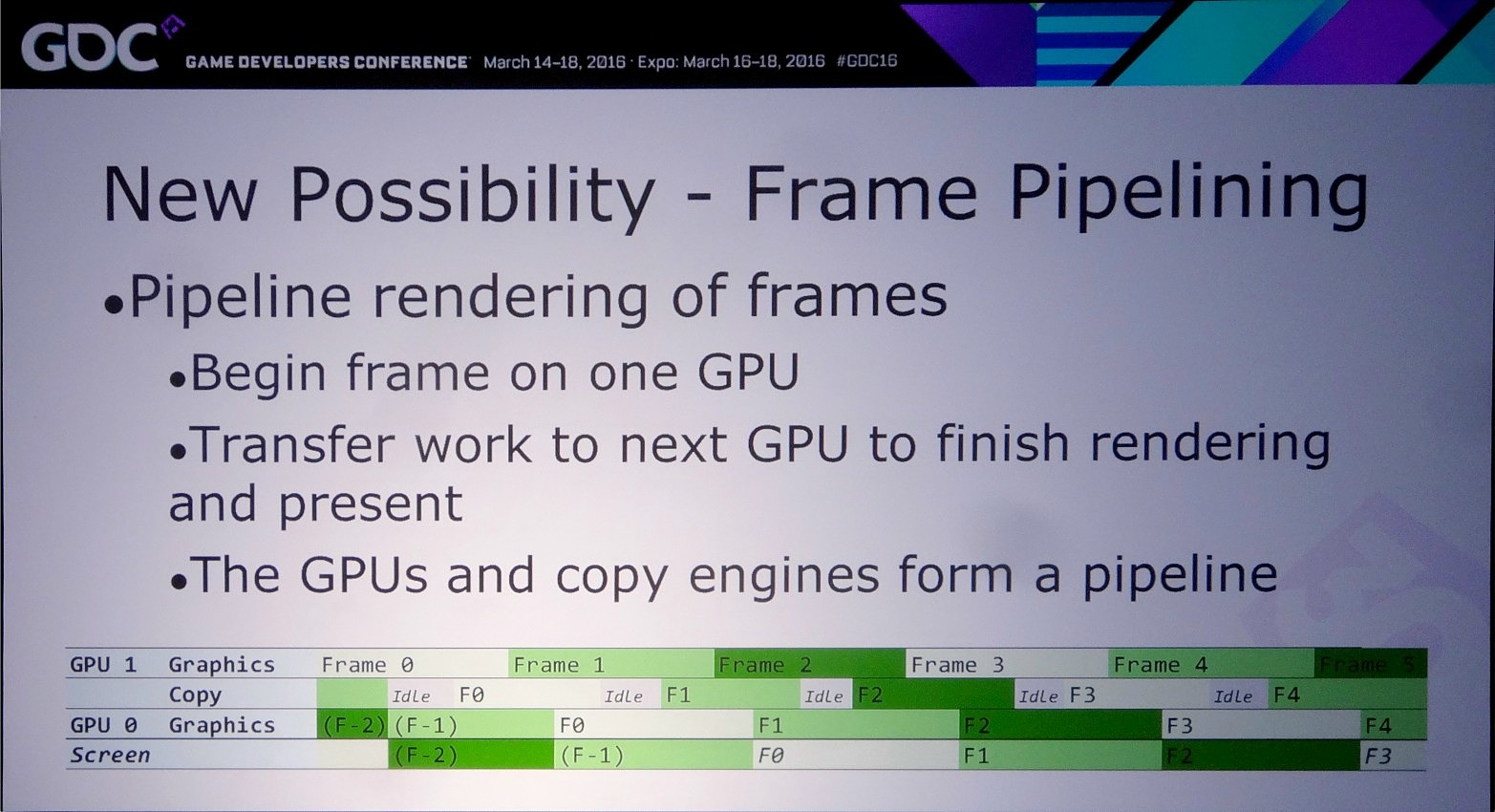
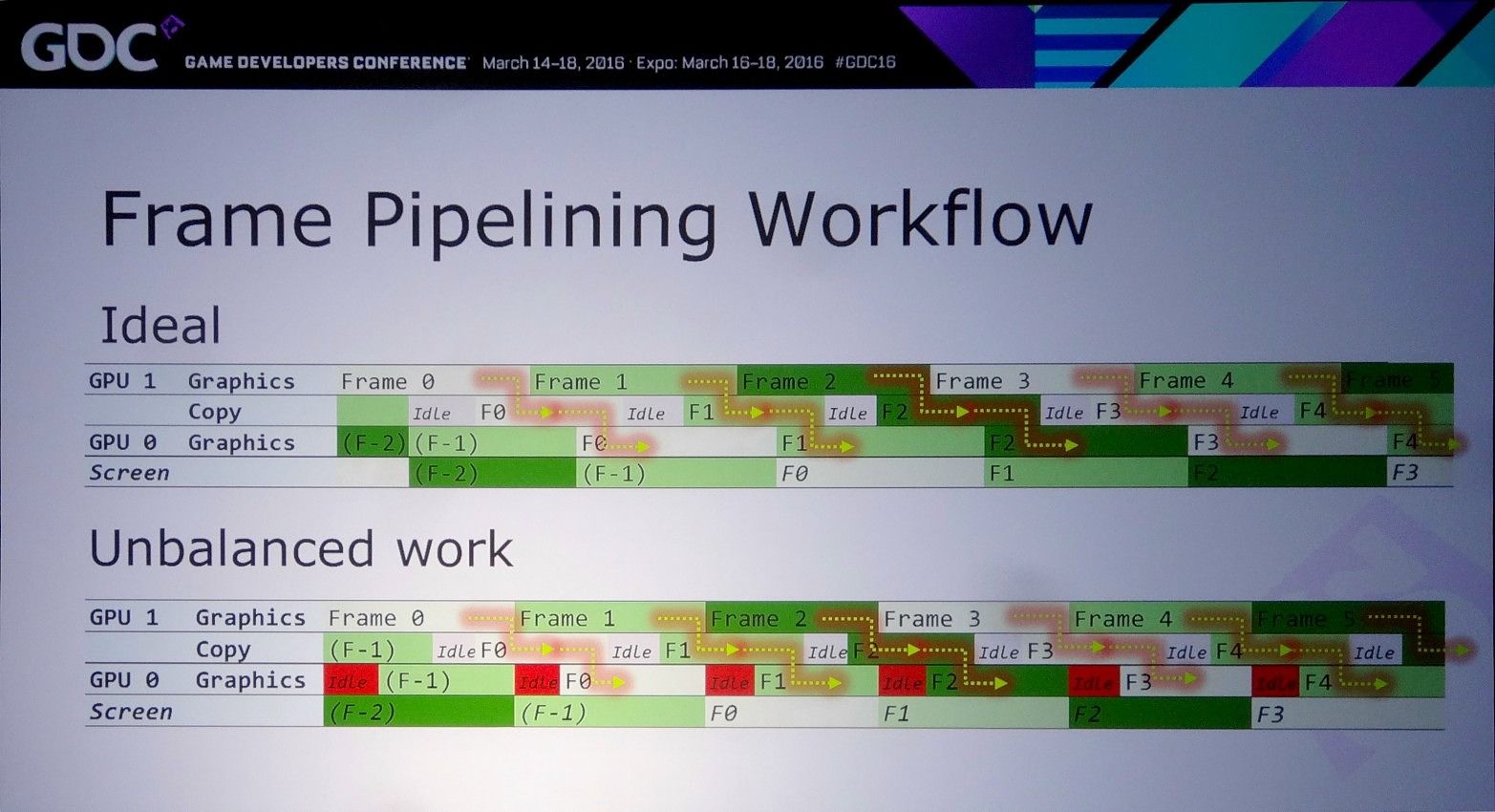
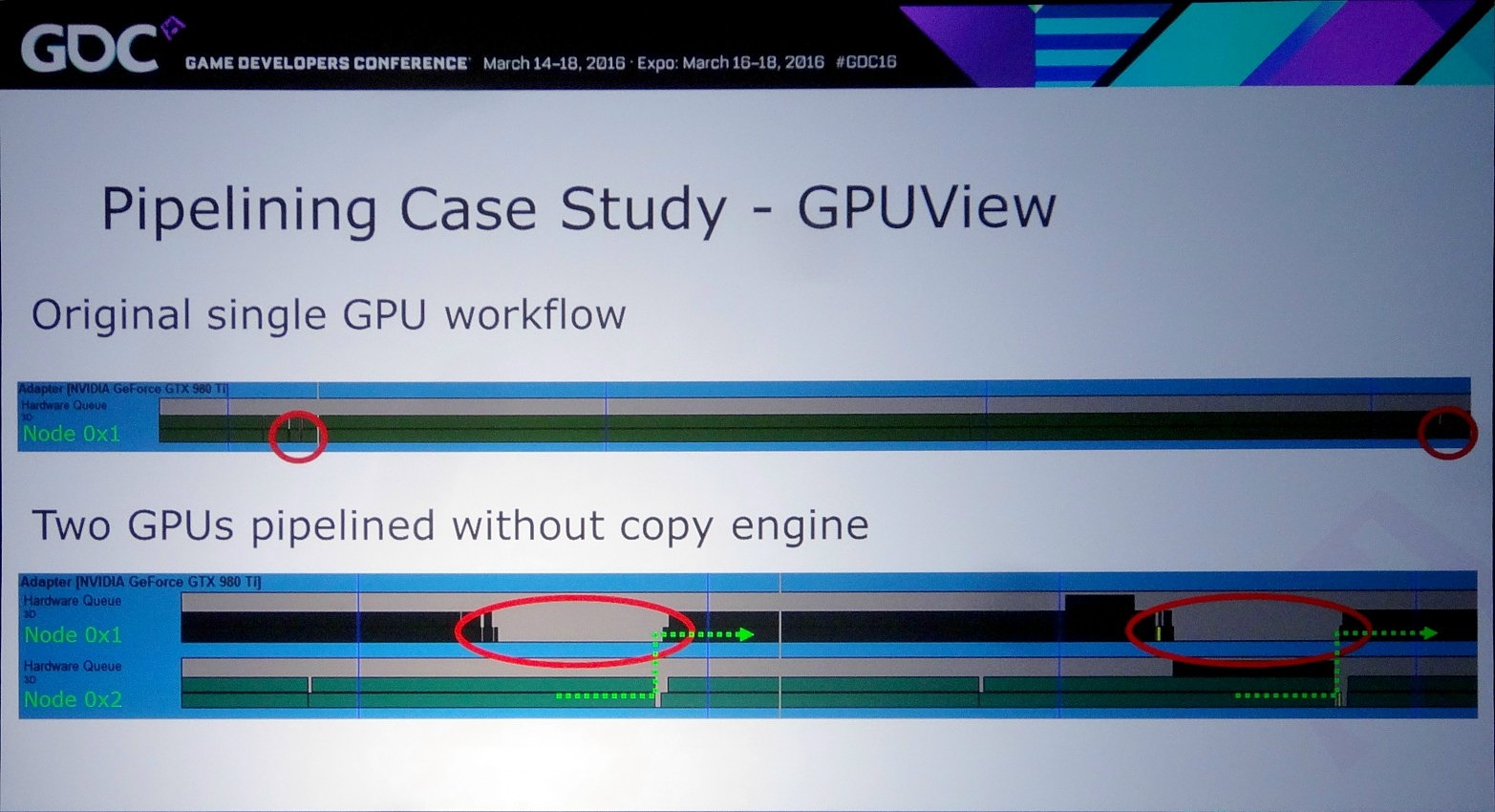
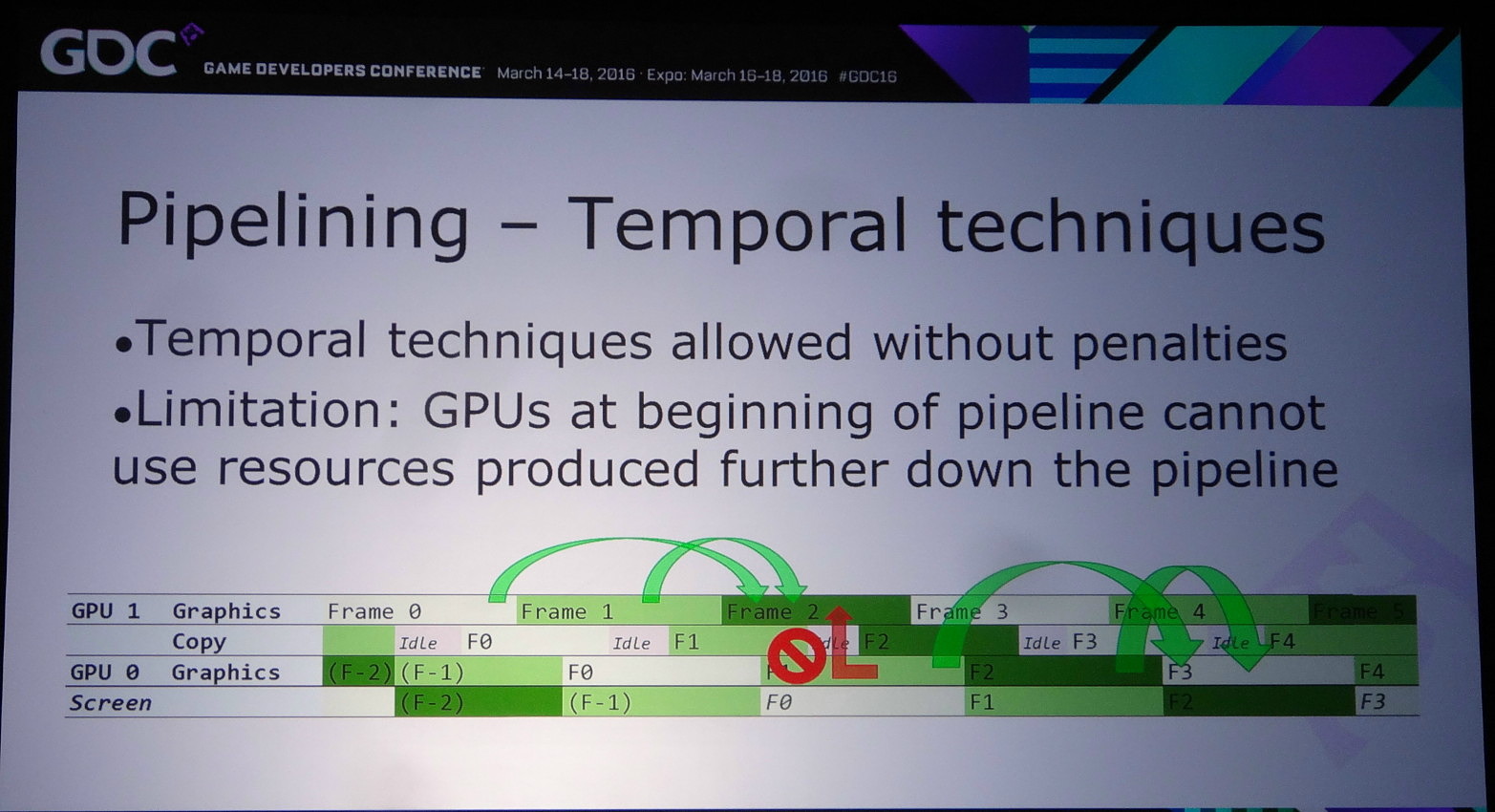
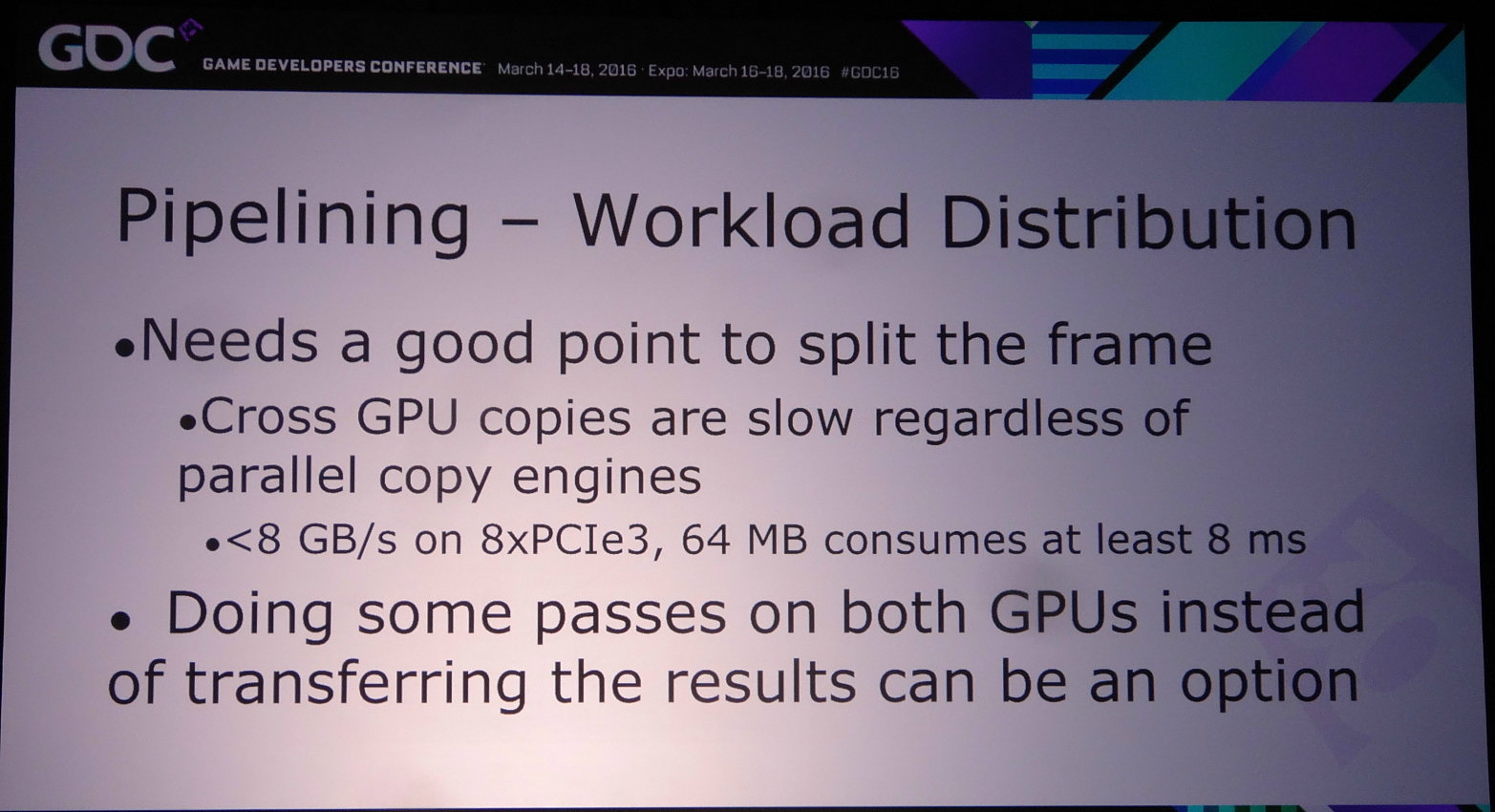
La solution à ces problème est appelée frame pipelining par Nvidia. Elle consiste à débuter le rendu d'une image sur un GPU et à transférer ces premiers éléments au second GPU en vue de la finalisation du rendu. Les GPU et leurs moteurs de copies travaillent alors à la chaine, d'où le nom de cette approche. Il est alors possible de prendre en charge sans problème un antialiasing temporel par exemple.
Pour mettre en place le frame pipelining, il faut parvenir à scinder son rendu en deux phases qui représentent une charge à peu près similaire et à un niveau qui permette de limiter les données à transférer. Il ne faut en effet pas oublier qu'un transfert de 64 Mo à travers un bus PCIe 3.0 8x prend au moins 8 ms, en général un peu plus en pratique. Pour éviter de transférer trop de données il peut alors être censé de dédoubler sur chaque GPU le calcul de certains éléments.
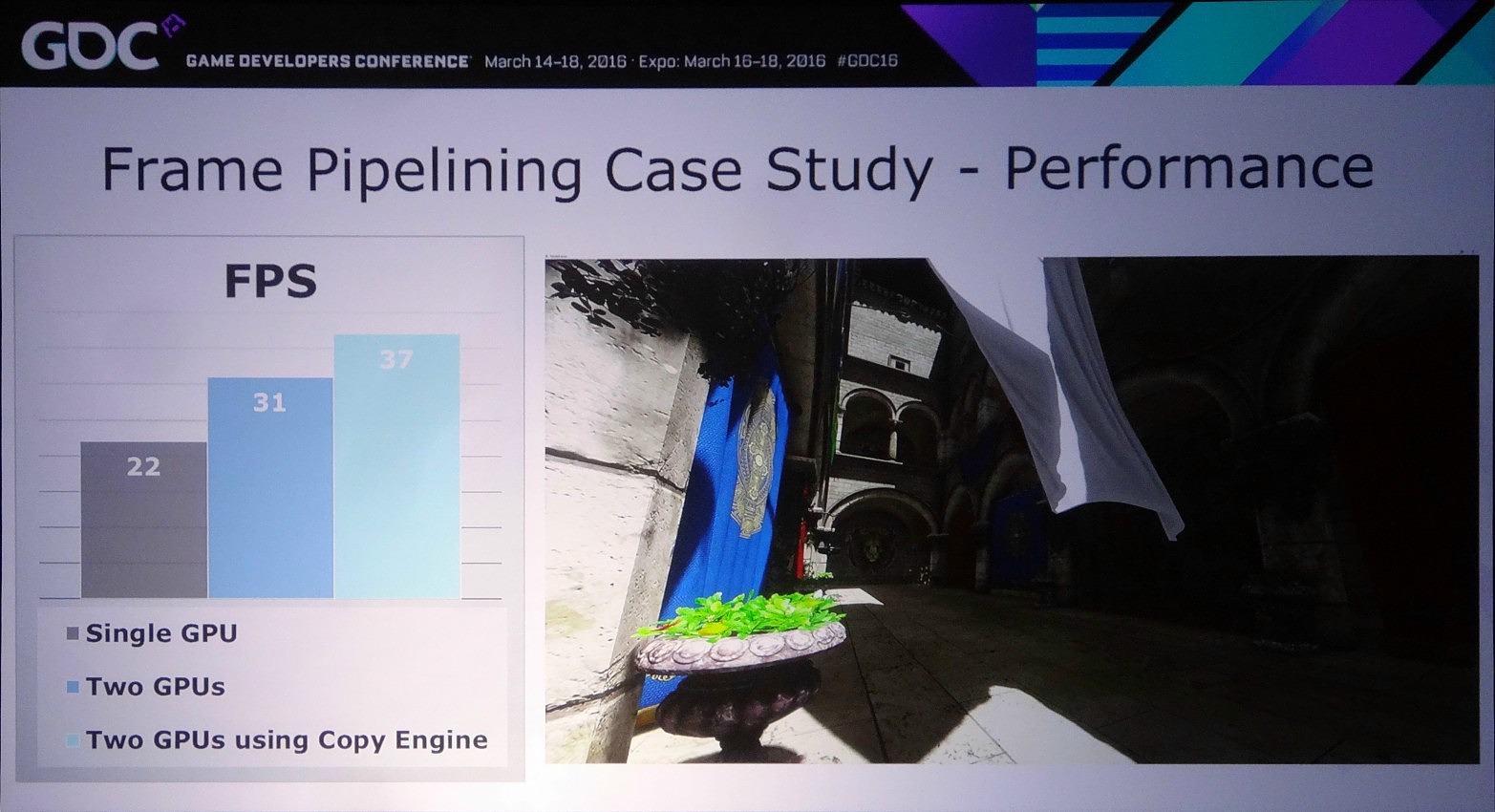
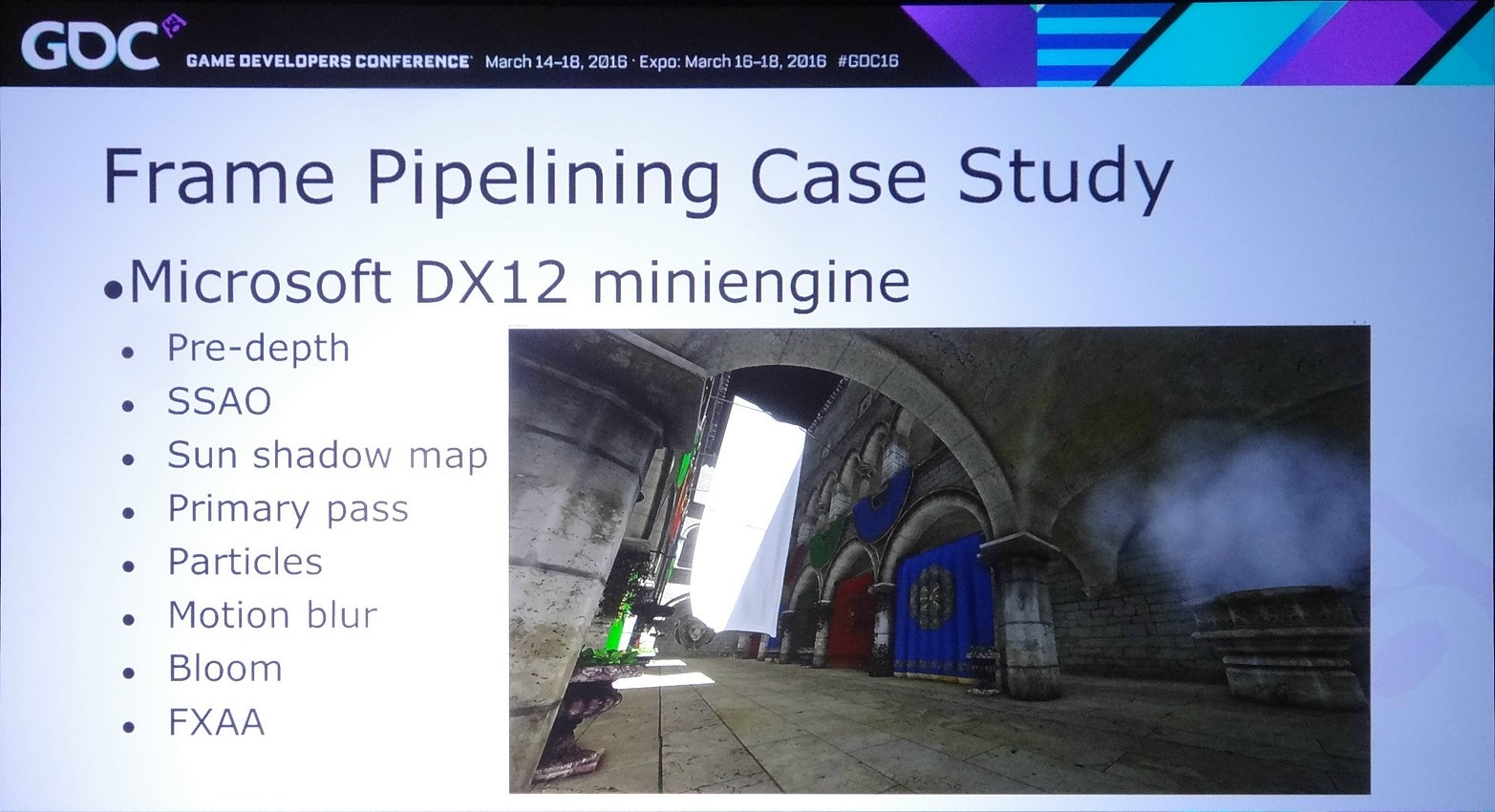
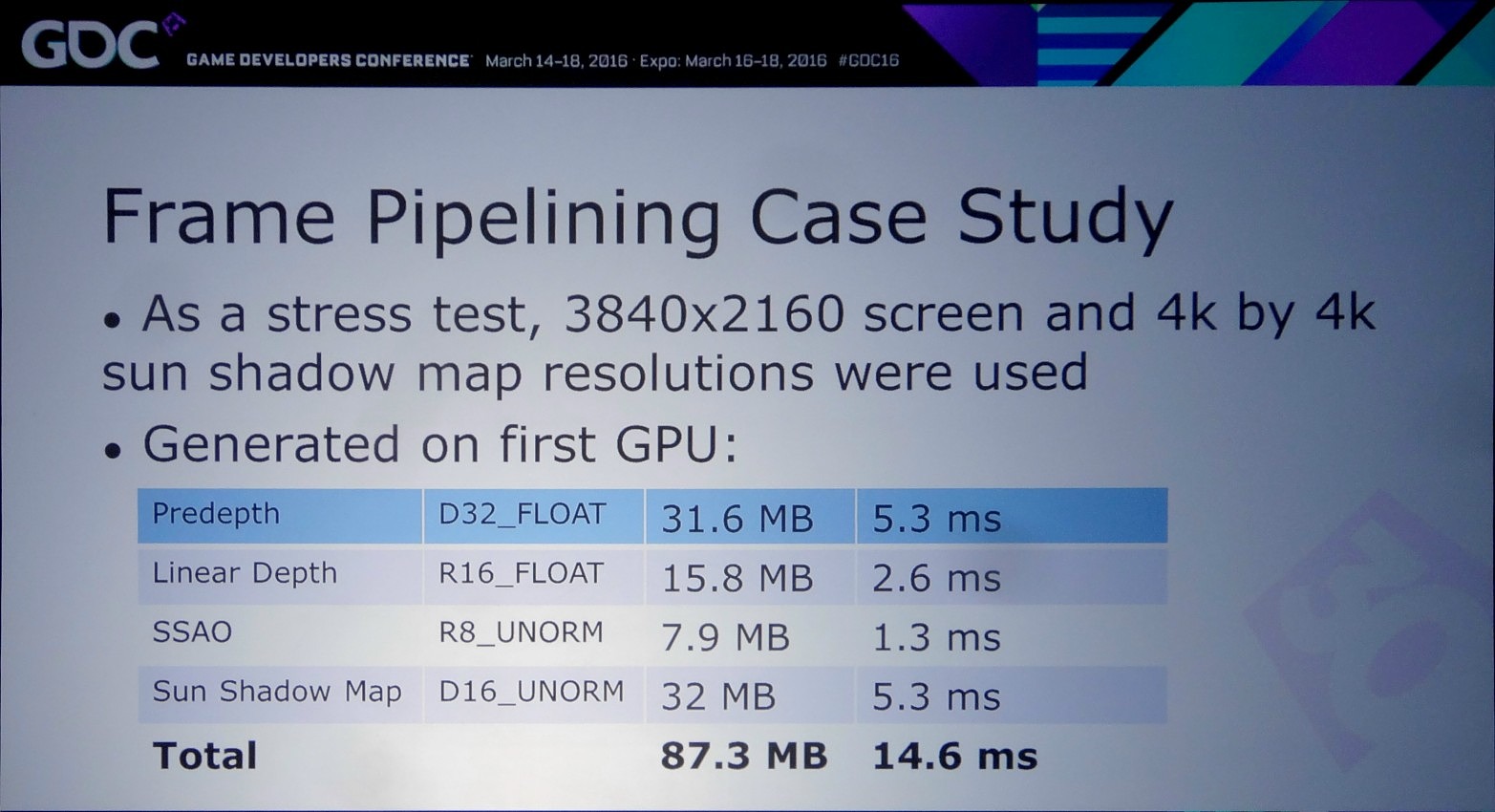
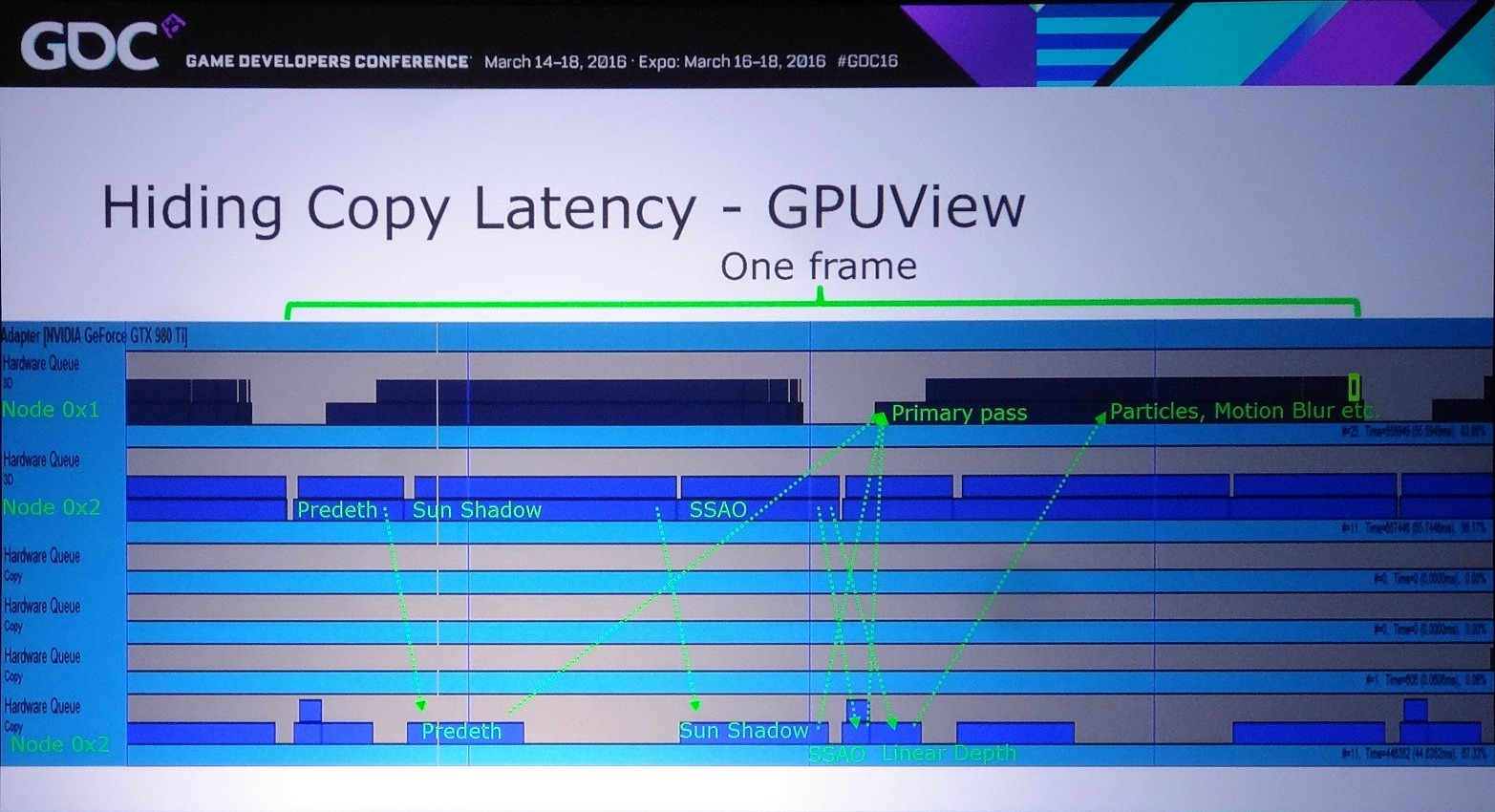
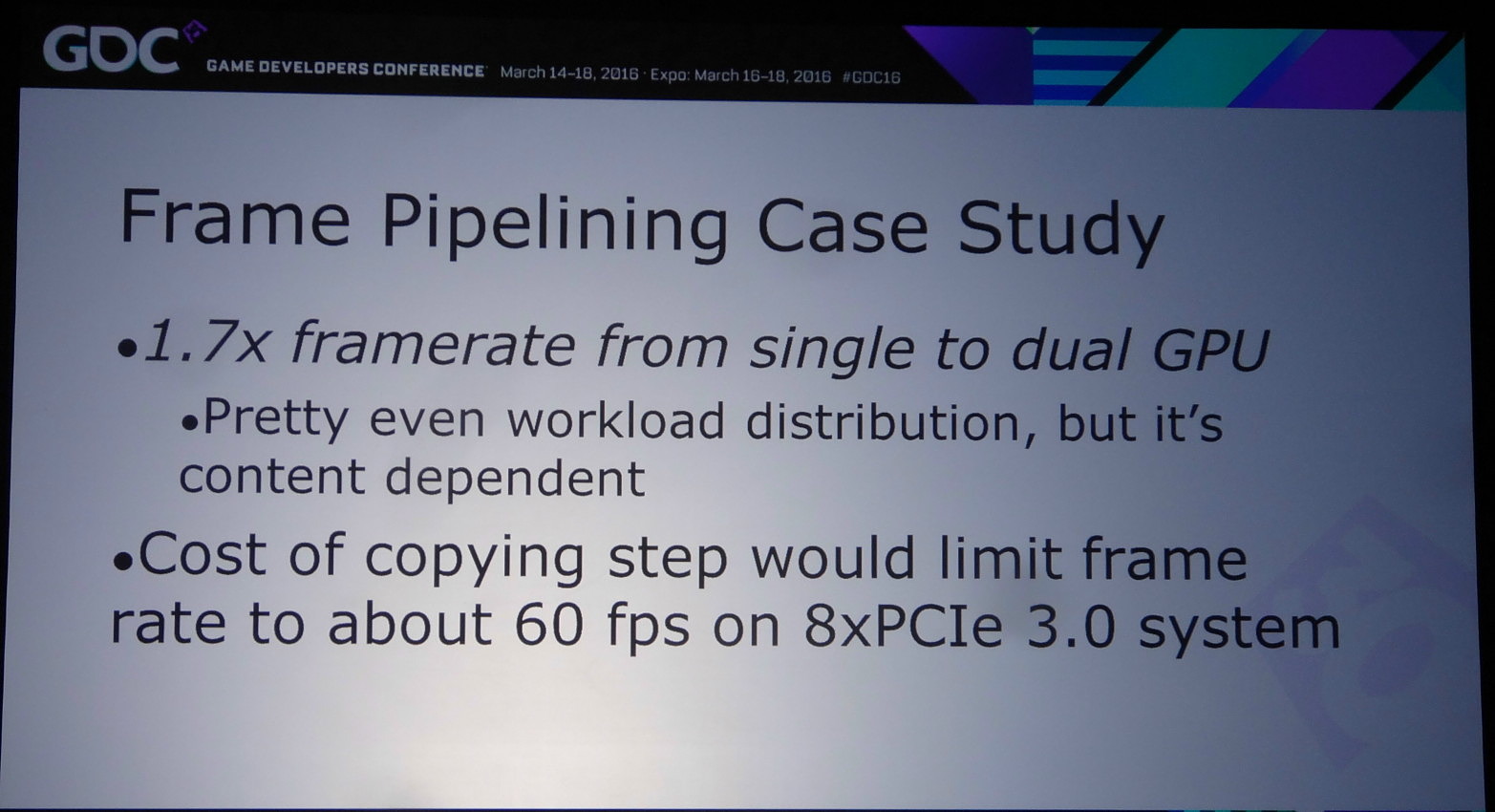
Dans l'exemple pris par Nvidia, le bi-GPU implémenté via le frame pipelining permet à la base de passer de 22 à 31 fps (+41%) et de monter à 37 fps (+68%) en exploitant le copy engine. Cet exemple est cependant un stress test en haute résolution (2160p) qui implique le transfert de la shadow map, du depth buffer et du SSAO, ce qui représente 87.3 Mo et prend à peu près 15 ms en PCIe 3.0 8x. Un temps de transfert qui limite le nombre de fps à +/- 60.
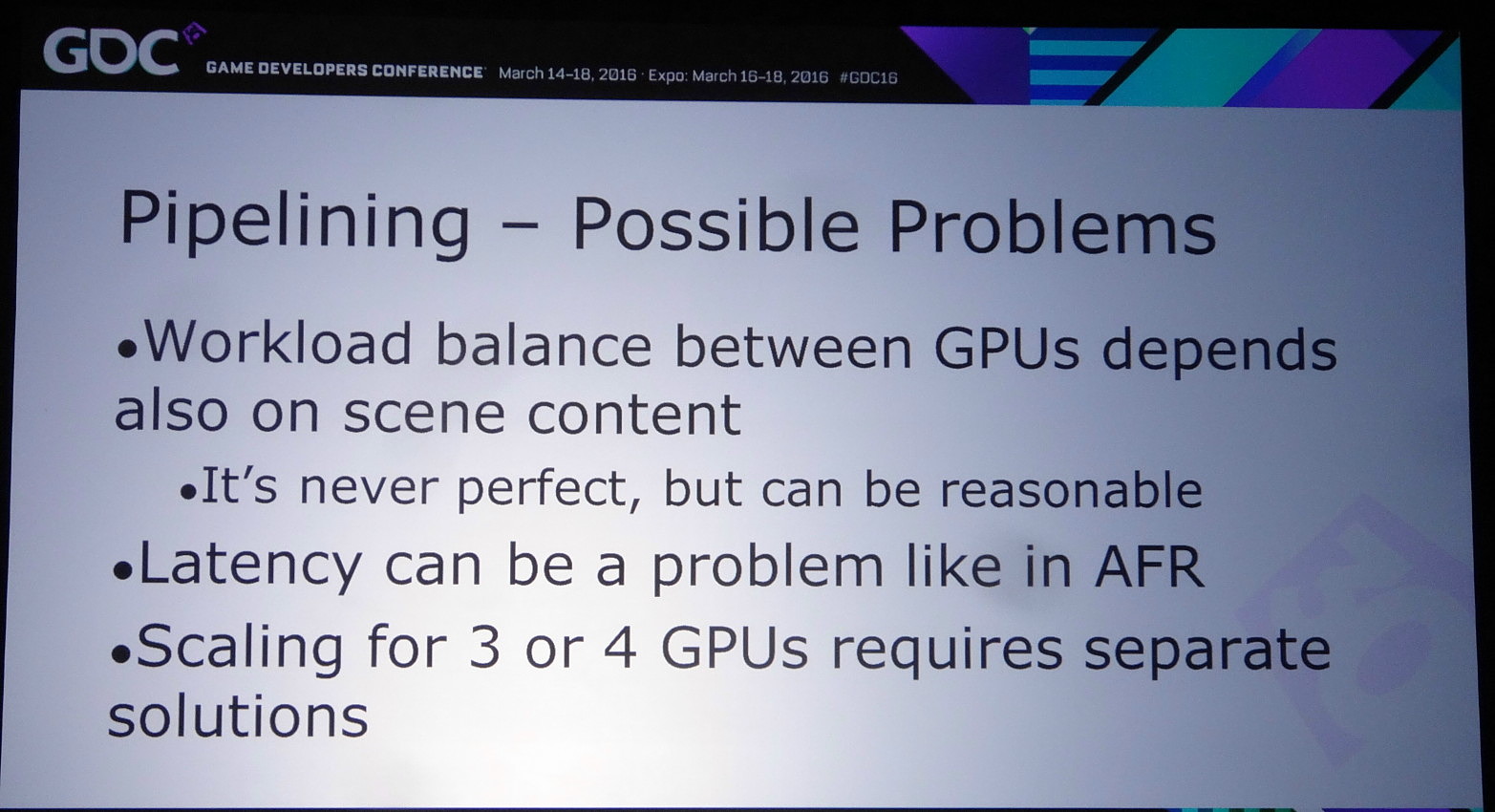
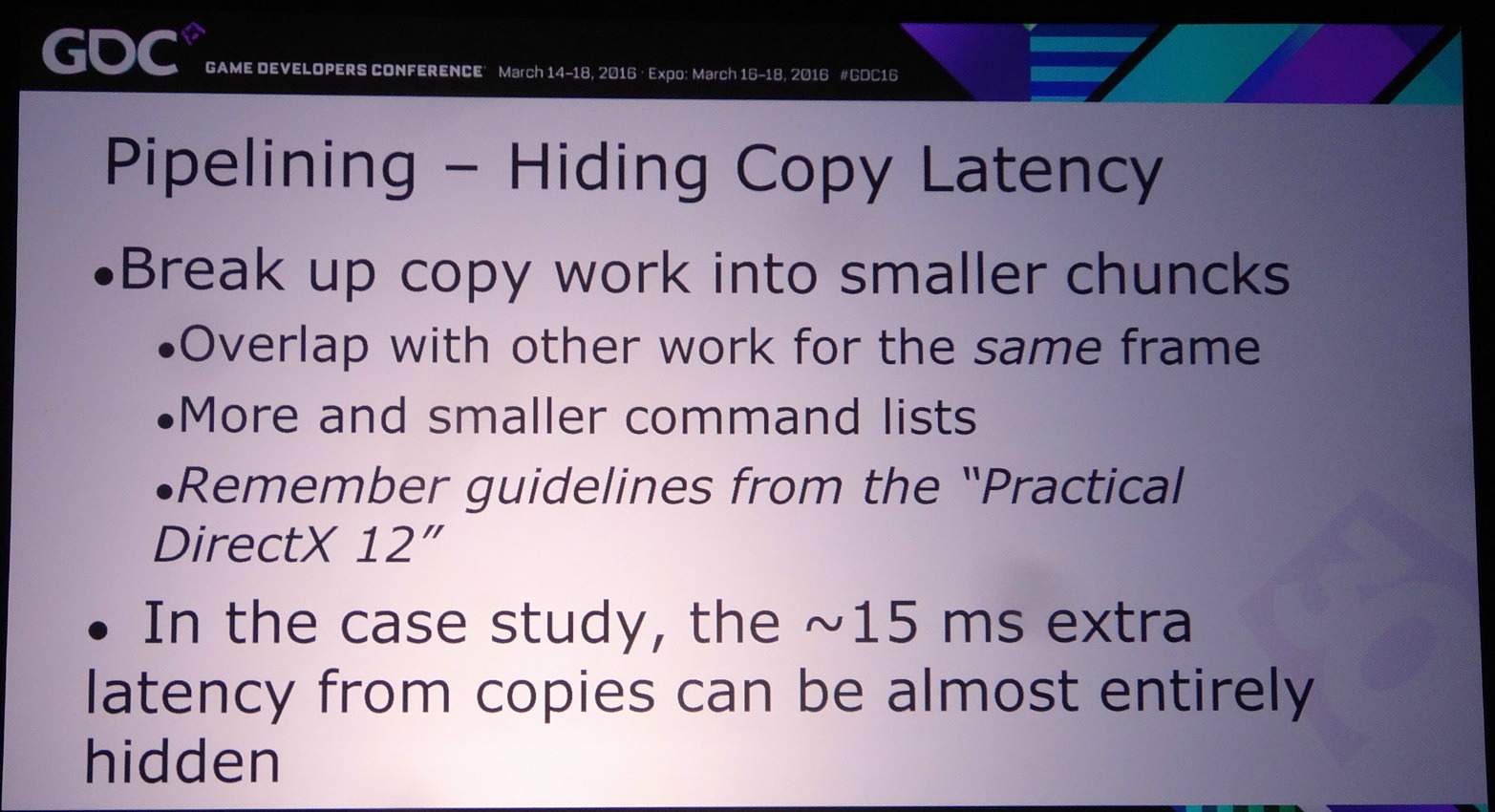
Le problème restant avec cette approche concerne la latence qui augmente à peu près comme en mode AFR. Le GPU1 effectue tout son travail, les données sont transférées puis le GPU effectue son travail. A 60 fps, et par rapport à un gros GPU de puissance équivalente, cela implique un triplement de la latence (de 16.7 ms à près de 50 ms). Heureusement, la partie liée au transfert de cette latence supplémentaire peut être masquée, exactement comme le fait Oxide pour le mode Async Compute d'AotS. Il suffit de décomposer le rendu en plus petits groupes de commandes et de transférer progressivement les éléments entre les GPU à travers le copy engine.
Reste bien entendu à voir ce que feront les développeurs de tout cela et à quel point AMD et Nvidia pourront les aider. Même si implémenter le frame pipelining en prenant en compte uniquement des ensembles de GPU similaires est plus simple que d'autres modes de rendus avec des combinaisons exotiques, cela représente un travail supplémentaire que tous n'accepteront probablement pas de prendre en charge. Et nous ne parlons mêmes pas des modes tri-GPU et quadri-GPU dont le support exigerait des développements complémentaires spécifiques
Vous pourrez retrouver l'intégralité de la présentation de Nvidia ci-dessous :
GDC: VR: Nvidia Multi-Res Shading en pratique
Nous avons profité de la GDC pour revenir sur une technique introduite par Nvidia il y a quelques mois pour booster les performances de la réalité virtuelle. Baptisée Multi-Resolution Shading, elle consiste à réduire la résolution au niveau des zones visuelles périphériques et donc le nombre de pixels réellement rendus. Un subterfuge plutôt convainquant en pratique.
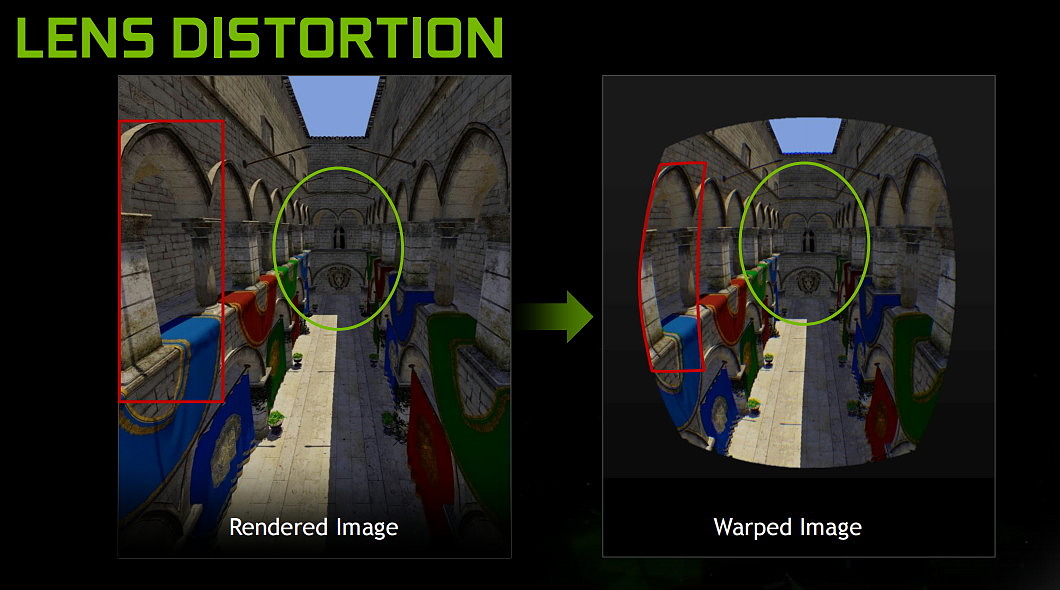
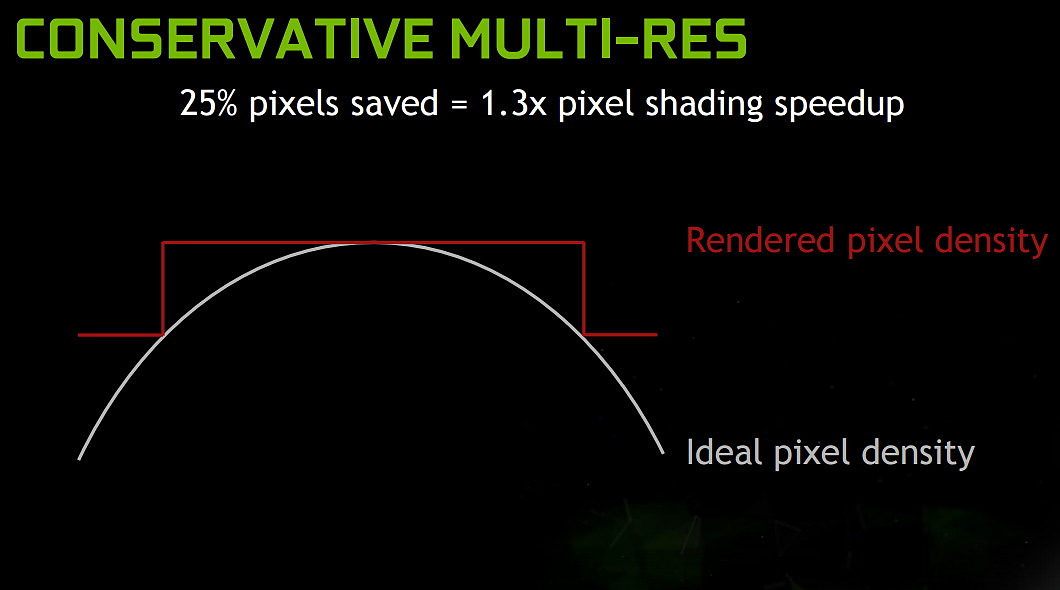
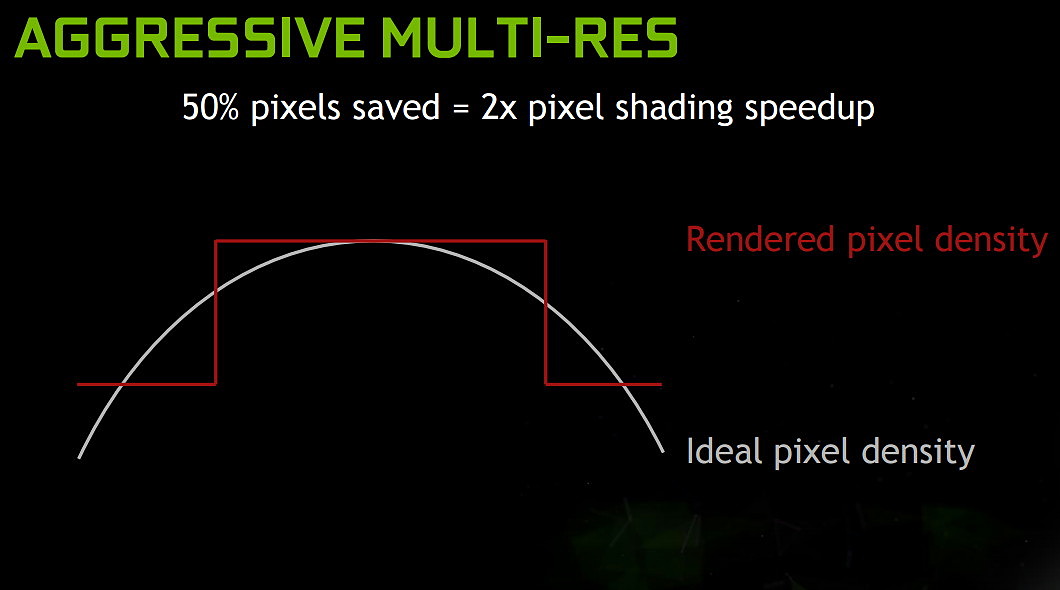
Pour pouvoir afficher une image sur un casque de réalité virtuelle, elle doit être déformée pour permettre, avec la lentille, de proposer l'angle de vue correct. Ce procédé, appelé warping et illustré ci-dessus, implique que seul le centre de l'image conserve la pleine résolution. Les zones périphériques représentent au final moins de pixels que le GPU n'en a calculés. En d'autres termes, elles reçoivent automatiquement une dose plus ou moins élevée de supersampling alors que ce n'est pas là que se pose notre regard. Un gaspillage de ressources que Nvidia tente de réduire avec le Multi-Res Shading.
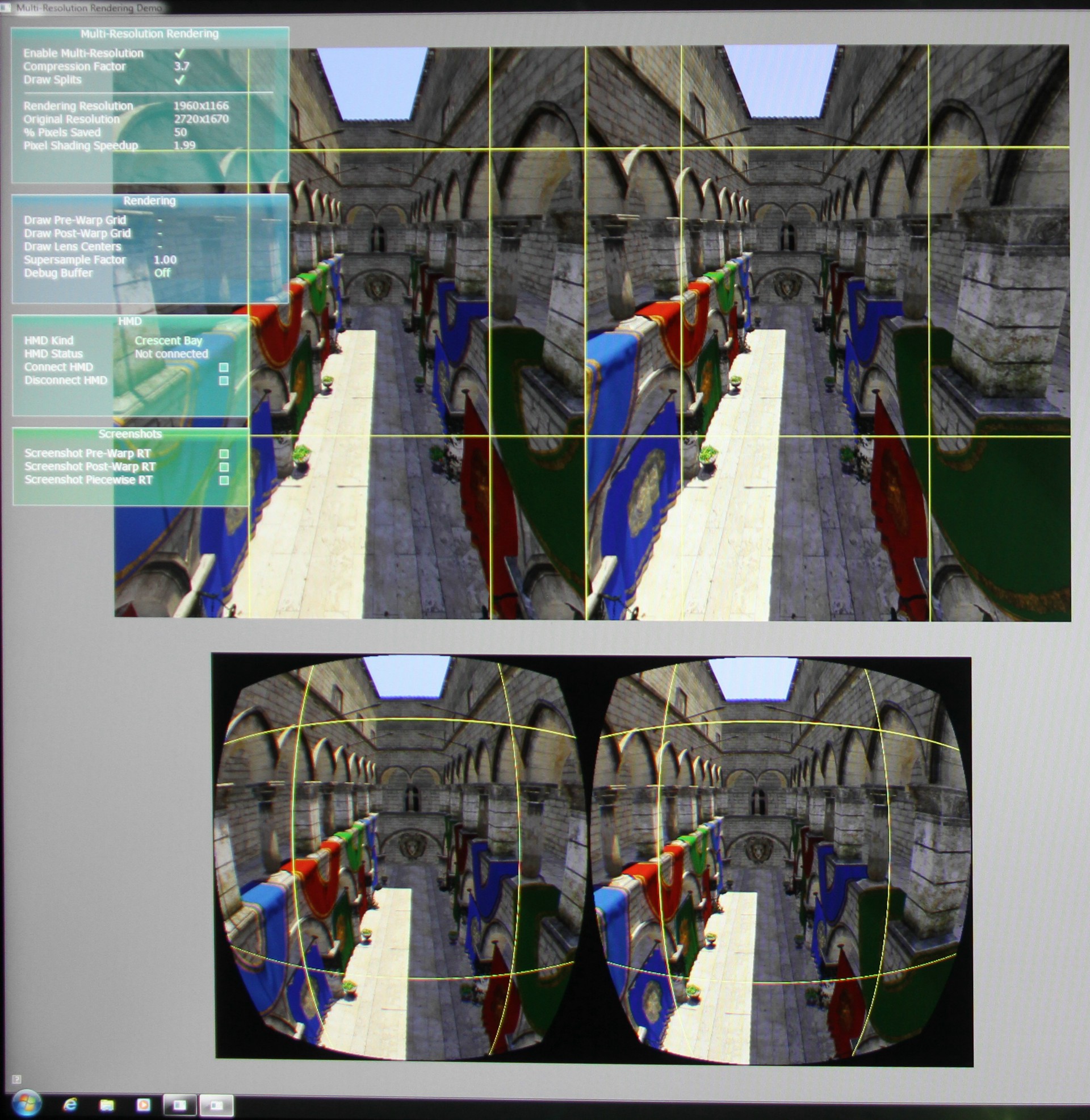
La démonstration de Nvidia permet d'activer et désactiver le Multi-Res Shading à loisir, de quoi pouvoir essayer de discerner les différences éventuelles. Et force est de constater que même en ayant conscience de l'activation de cette optimisation il est difficile d'en discerner les effets. Il faut savoir exactement où regarder et déplacer le regard vers les coins de l'image (ce que nous ne sommes pas censés faire avec un casque de VR) pour observer une légère différence.
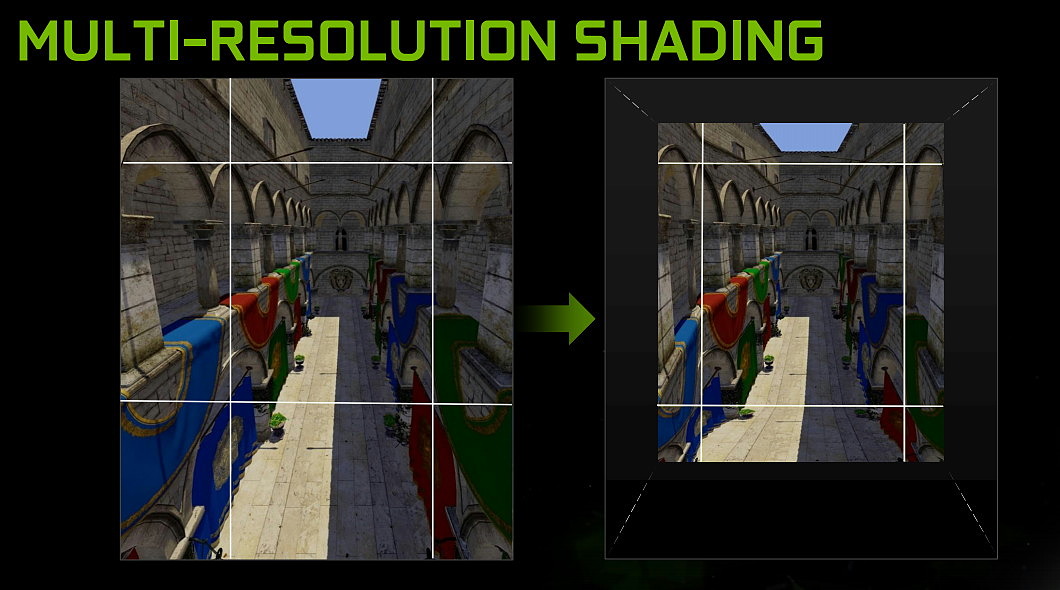
Comme vous pouvez l'observer sur les illustrations ci-dessus, Nvidia a recours à 9 viewports de résolutions différentes. Par exemple, la résolution peut être réduite à 1/2 sur les côtés et à 1/4 dans les coins. Mais si le principe est simple, l'exécution est un peu plus complexe et profite du multi-projection engine des GPU Maxwell 2 pour projeter rapidement, en une seule passe, tous les triangles dans chacun des 9 viewports. Sans cette capacité matérielle (également exploitée pour le VXGI et le VXAO), le coût sur les performances serait important à prohibitif suivant la complexité de la scène. AMD nous a d'ailleurs confirmé que cette technique n'était pas réaliste pour ses GPU, tout en précisant essayer d'obtenir un résultat similaire via d'autres approches.
Le Multi-Res Shasing est proposé par Nvidia aux développeurs à travers le SDK VR Works mais a également été implémenté dans l'Unreal Engine il y a quelques mois et, à l'occasion de la GDC, Unity a suivi le mouvement en annonçant son intégration, avec le reste de la suite VR de Nvidia.
GDC: Vers de nouveaux types de shaders ?
Comme vous le savez, le rendu en 3D temps réel moderne fait appel à différentes phases programmables lors desquelles sont exécutés de petits programmes appelés shaders. Après les pixel/fragment et vertex shaders qui exécutent des opérations sur les pixels/fragments et les vertices, ont été progressivement introduits les geometry shaders qui travaillent sur les primitives, les compute shaders pour du calcul plus généraliste ainsi que les hull et domain shaders dédiés à la tessellation. D'autres pourraient débarquer dans le futur.
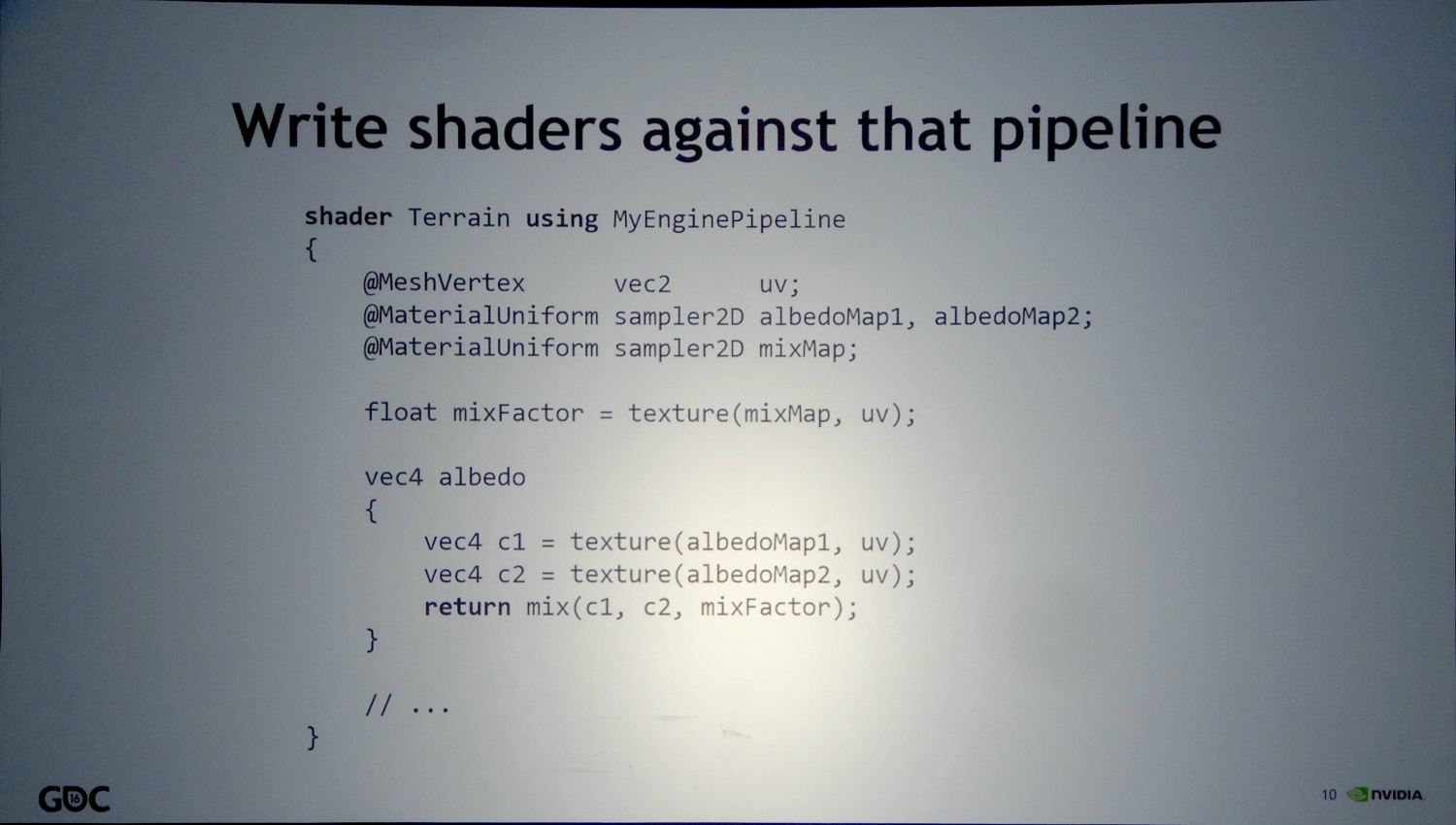
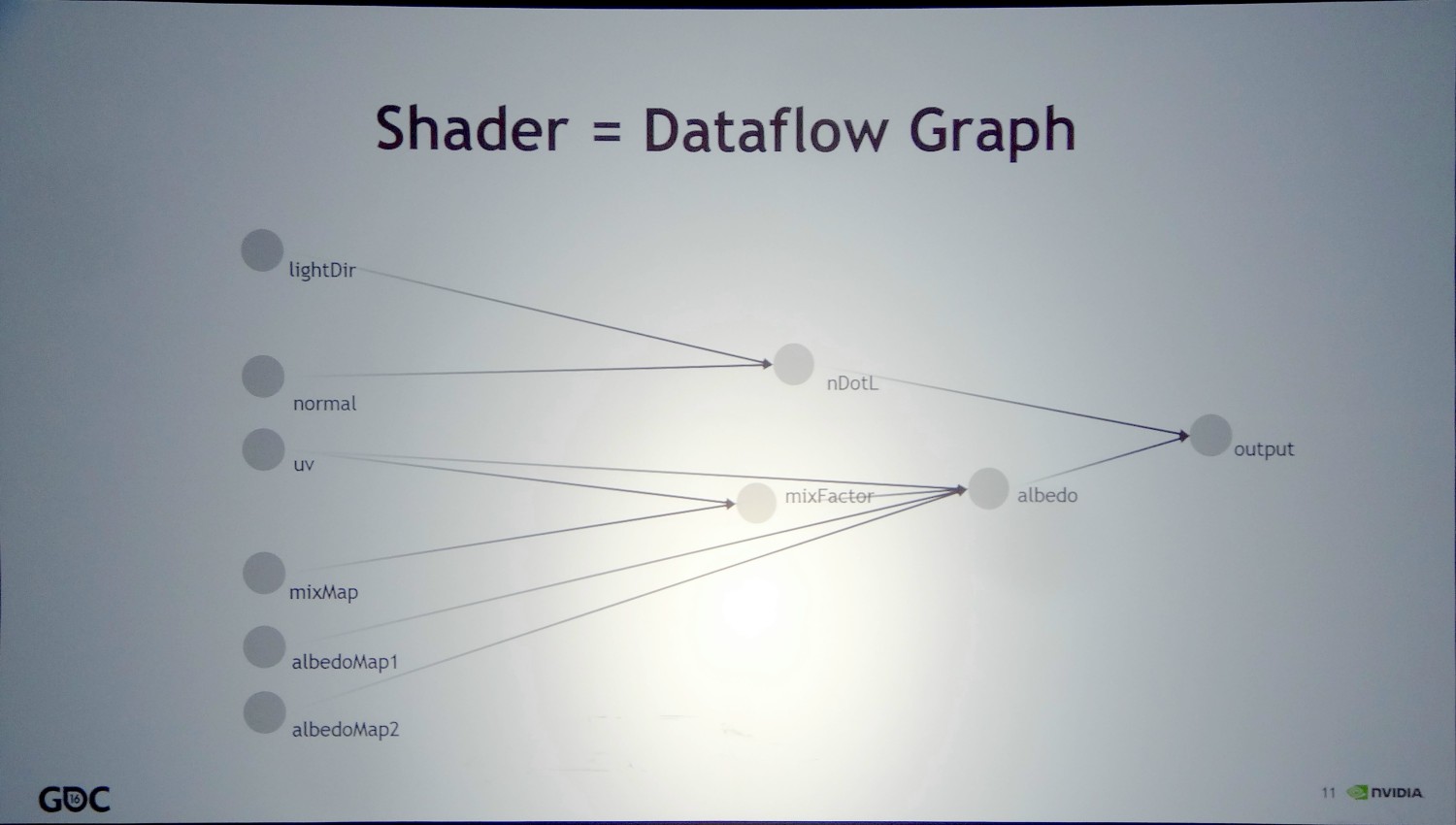
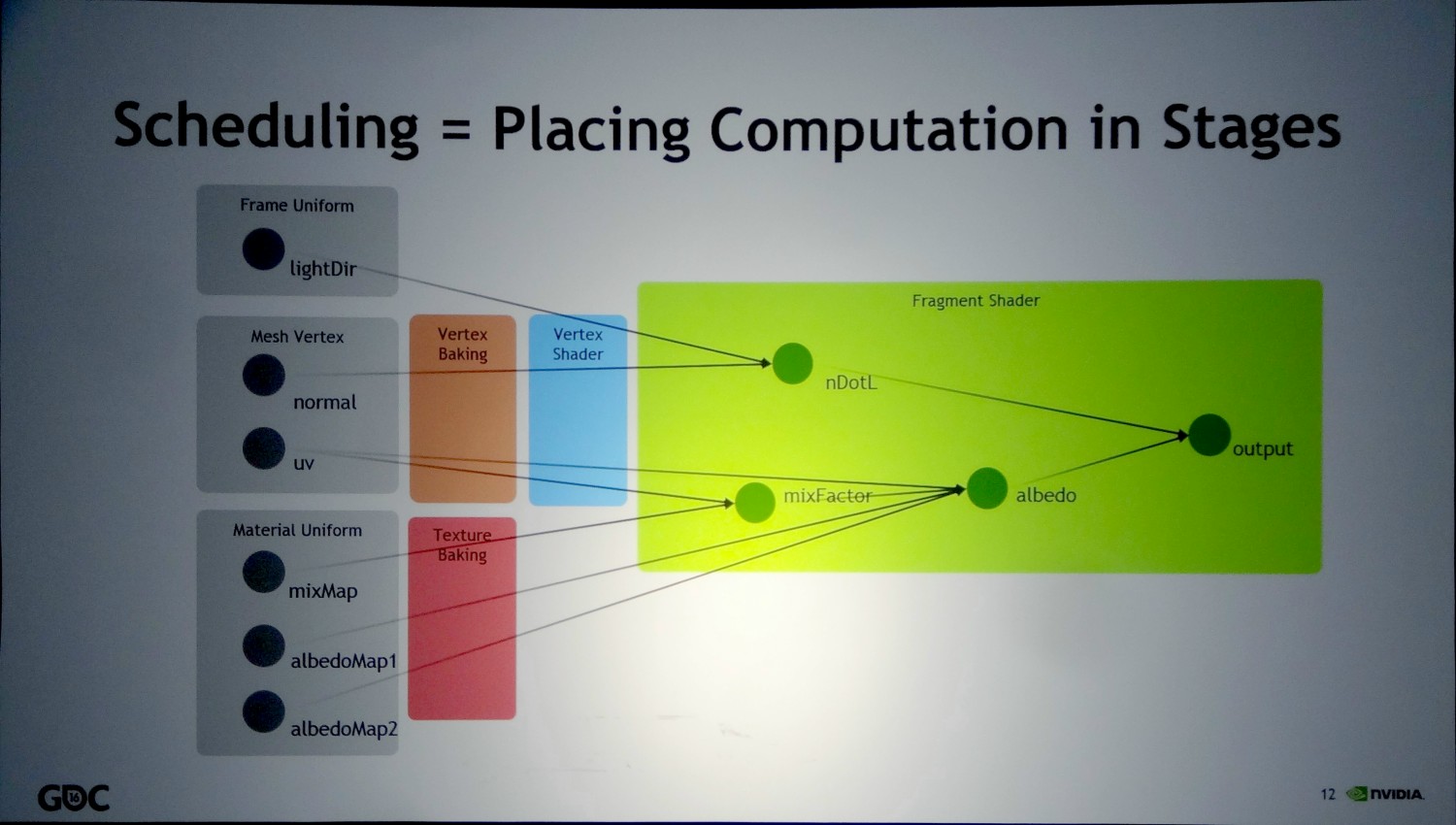
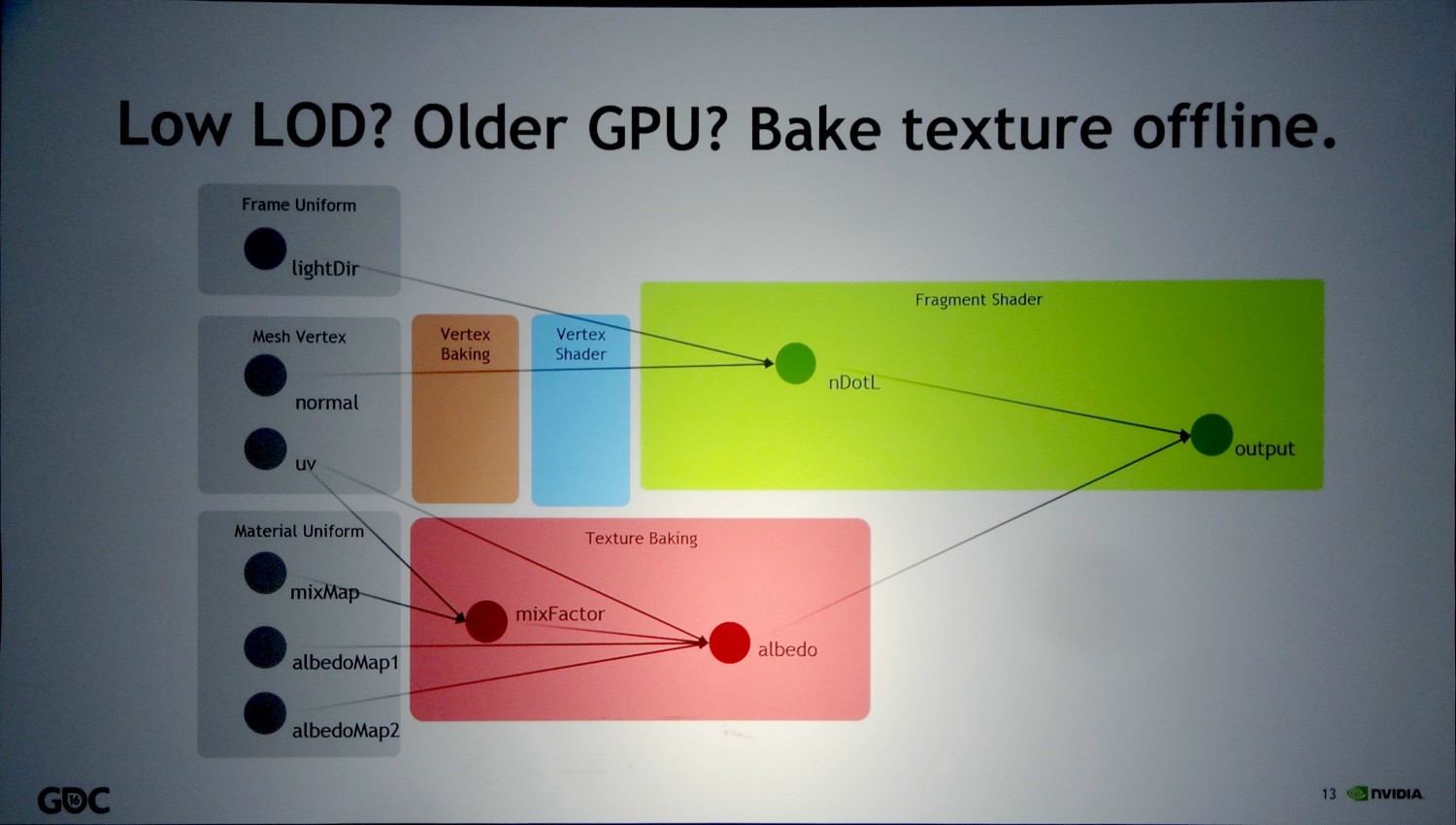
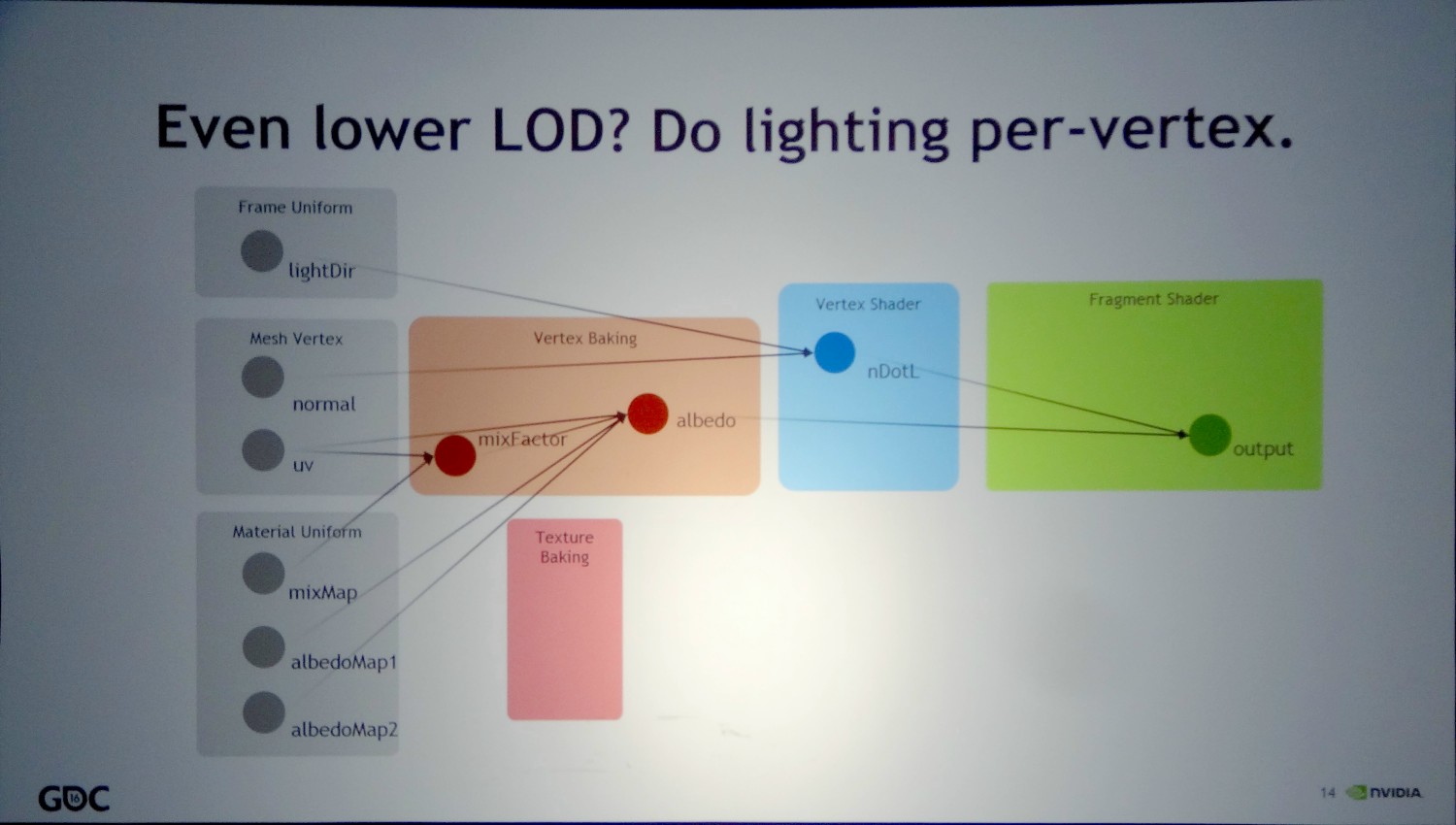
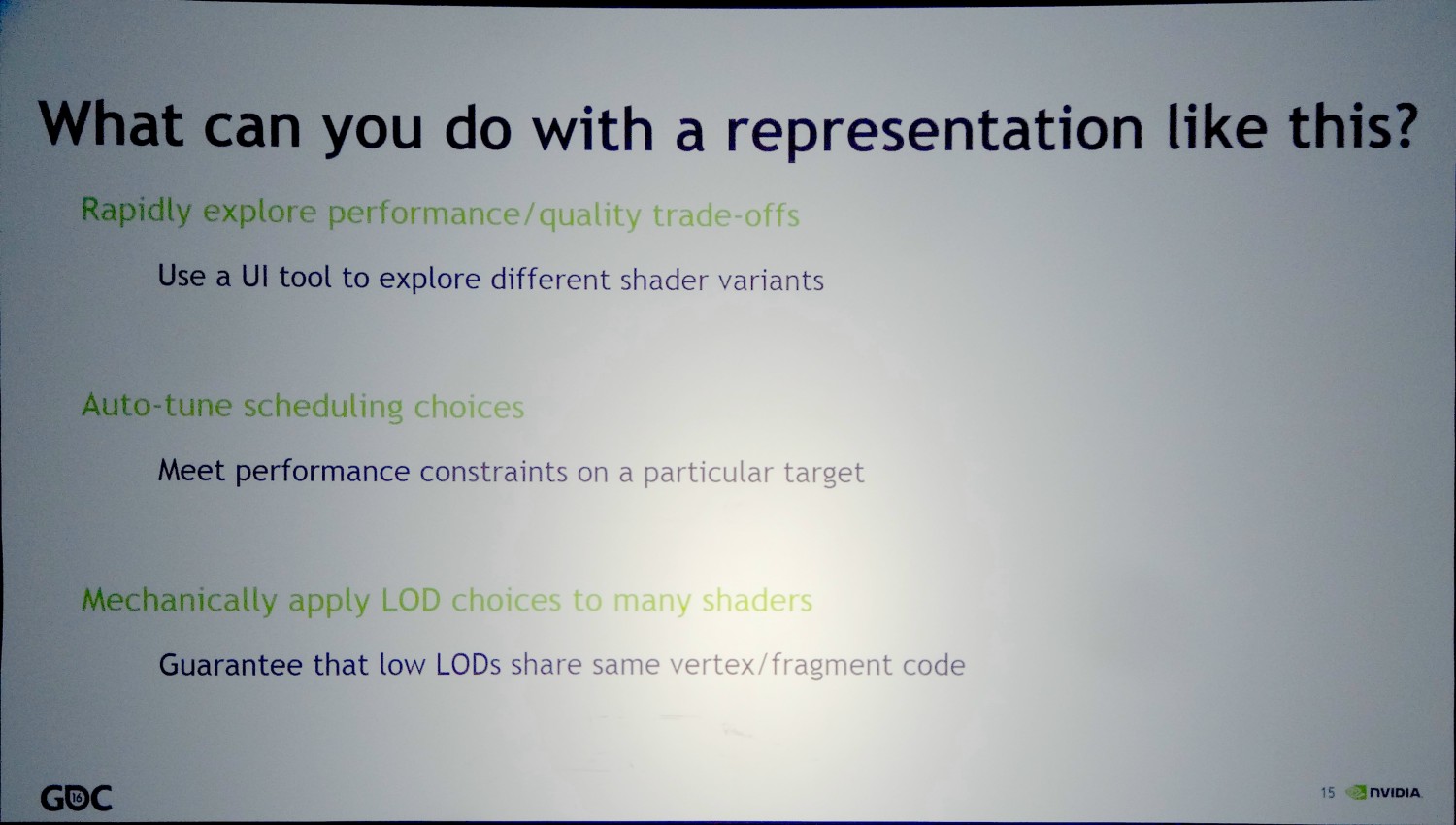
Au détour d'une présentation de Nvidia Research, une section consacrée à la programmation des shaders a attiré notre attention. Lors de celle-ci, Nvidia a encouragé les développeurs à mettre en place leurs propres outils de compilation de manière à ce qu'ils puissent répondre à leurs besoins précis, à faciliter la gestion de plusieurs niveaux de détails (LOD), à supporter différentes plateformes ainsi que de futurs pipelines de rendu qui pourraient avoir recours à de nouveaux types de shaders.
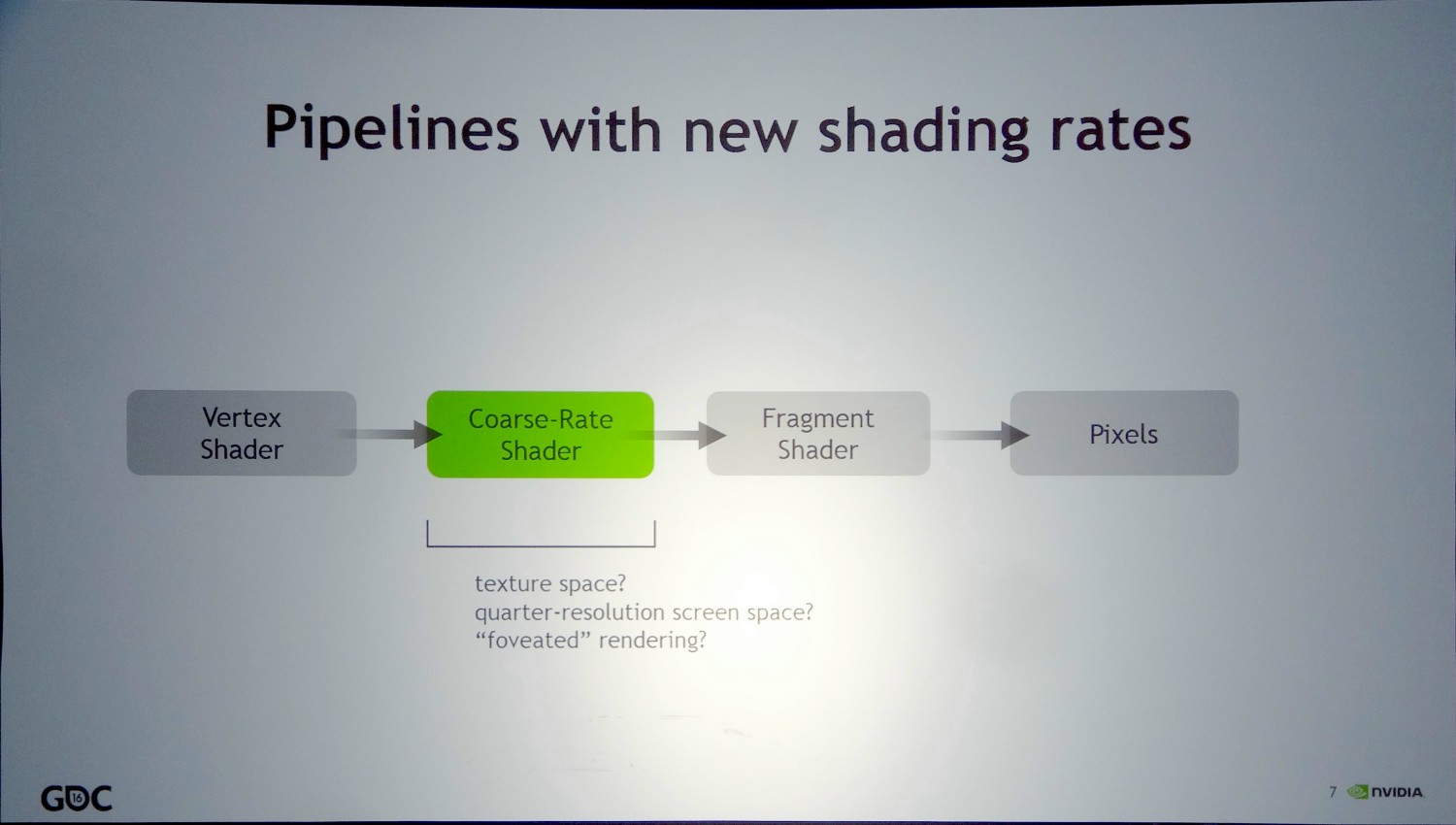
Nvidia cite deux exemples. Le premier, appelé génériquement Coarse-Rate Shader, représente différente possibilité d'exécution d'un shader dans une résolution et/ou un espace différents de ceux du framebuffer. De quoi par exemple traiter certains effets dans une résolution moindre, en appliquer dans l'espace propre aux textures ou encore en adapter au champ de vision propre à la VR. Passer par ce type de shaders intermédiaires serait plus efficace sur le plan du compromis qualité/performances que de se contenter de pixels shaders.
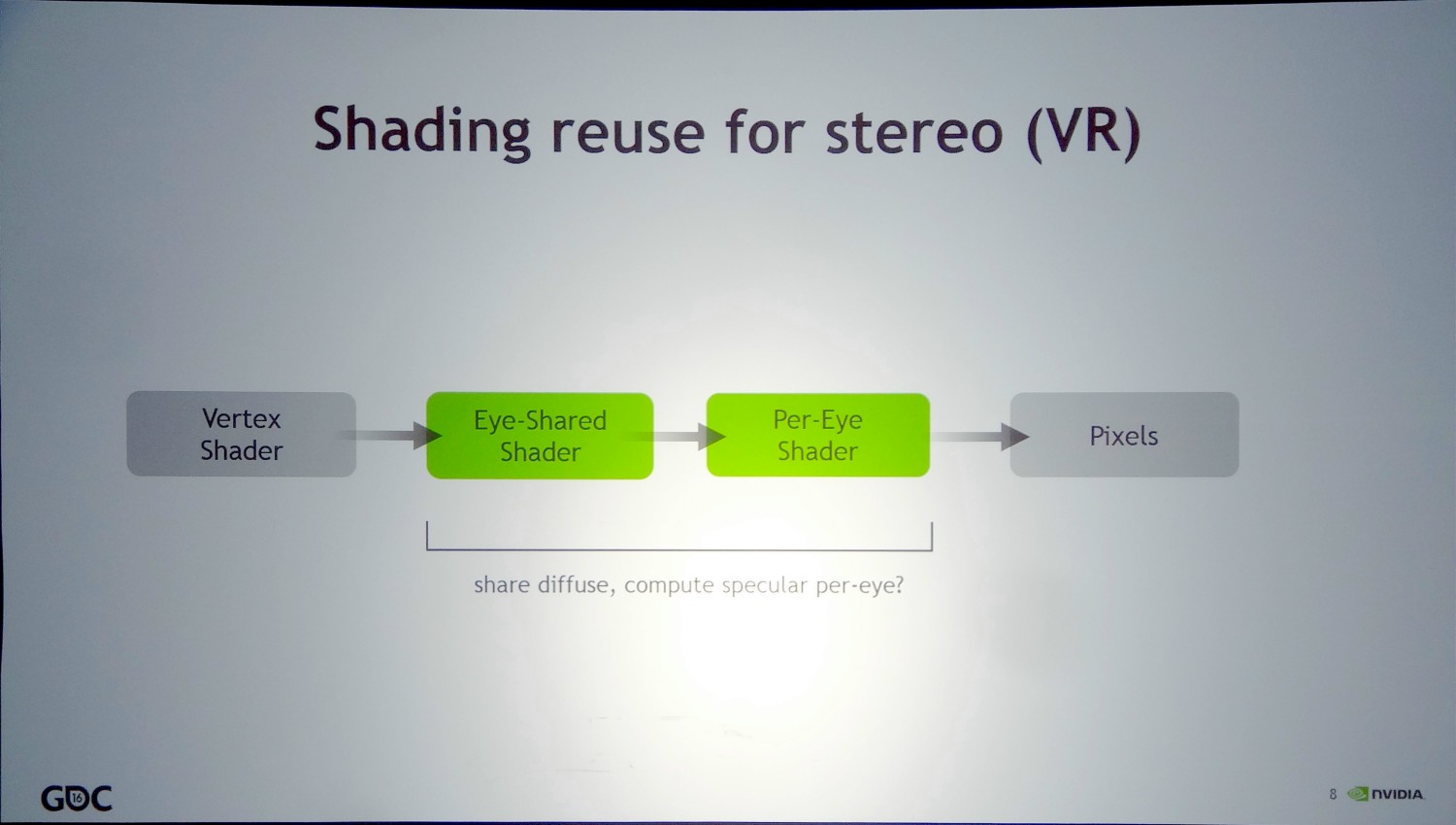
Le second exemple est dédié à optimiser les performances de la VR (ou de la 3D stéréo) et consisterait à scinder les pixels shaders en programmes correspondant aux tâches partagées par les deux yeux (Eye-Shared Shader) et spécifiques à chaque oeil (Per-Eye Shader). Une partie des éléments du rendu ne seraient ainsi calculés qu'une seule fois pour les deux yeux, une approximation qui pourrait offrir un résultat satisfaisant dans certains cas.
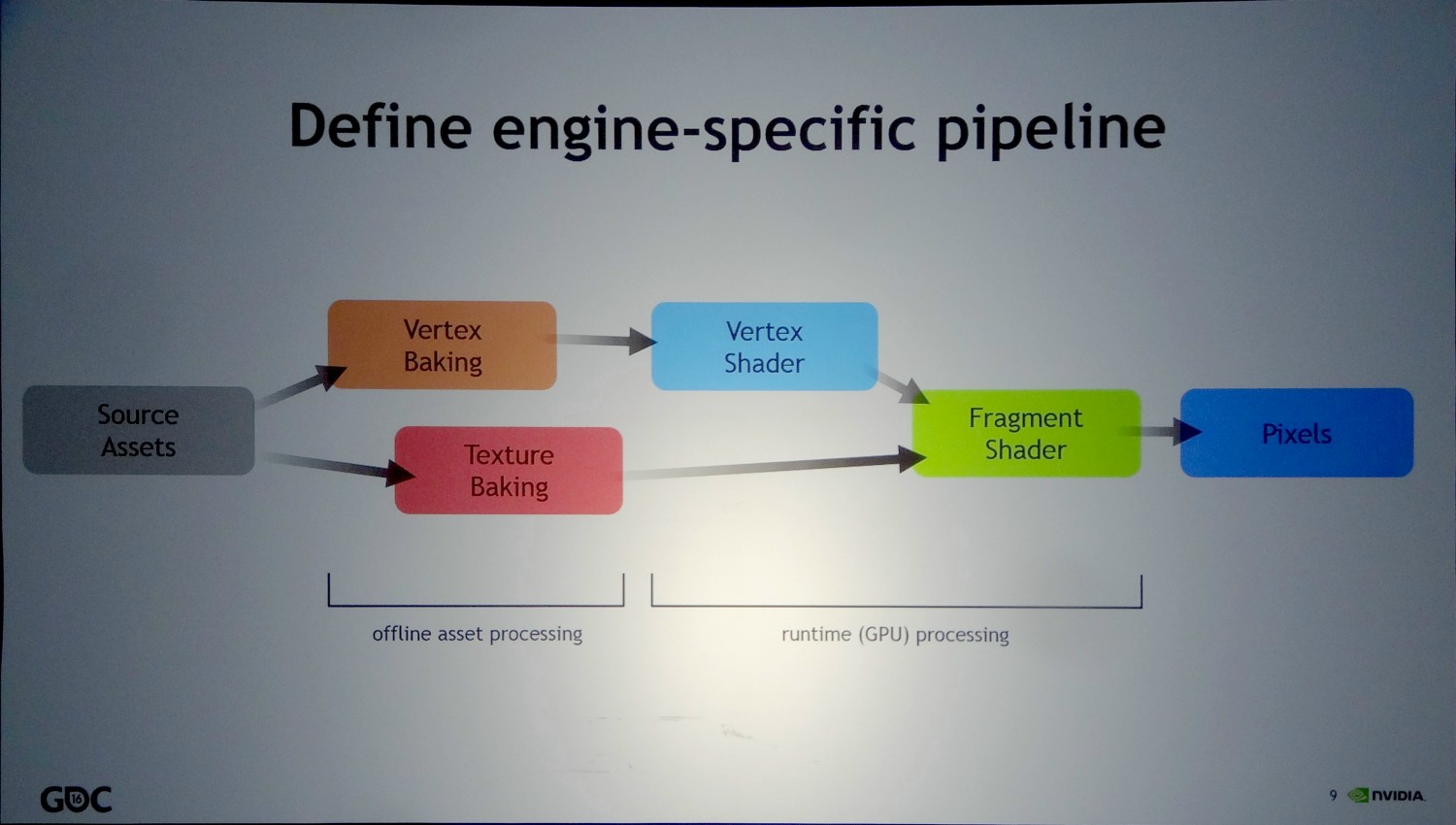
Nvidia explique que tout cela est déjà possible à travers la mise en place d'un pipeline de rendu software, c'est-à-dire à base de compute shaders. Il y a d'ailleurs pas mal d'expérimentations autour du remplacement d'une partie ou de la totalité du pipeline hardware classique par des compute shaders. Mais il est en général bien plus efficace de faire en sorte de profiter des différentes étapes non programmables du pipeline hardware ainsi que des différents mécanismes voués à rendre plus performante l'exécution de shaders spécifiques.
Nvidia précise alors que de futurs pipelines hardware pourraient proposer un support pour ces nouveaux types de shaders et conseille aux développeurs de préparer leurs outils à cet effet. Si cela ne correspond à aucune annonce spécifique, en terme de support précis ou de timing, il semble évident que Nvidia travaille déjà à la prise en charge de nouveaux types de shaders pour ses futures générations de GPU.
Vous pourrez retrouver l'intégralité de la présentation de Nvidia ci-dessous :
GDC: Async Compute : ce qu'en dit Nvidia
Nous avons bien entendu profité de la GDC pour questionner Nvidia en vue d'en apprendre plus sur ce dont sont capables ses GPU en terme de prise en charge du multi engine de DirectX 12 sans réel succès ?
Au coeur de DirectX 12, cette fonctionnalité permet de décomposer le rendu en plusieurs files de commandes, qui peuvent être de type copy, compute ou graphics, et de gérer la synchronisation entre ces files. De quoi permettre aux développeurs de prendre le contrôle sur l'ordre dans lequel les tâches sont exécutées ou encore de piloter directement le multi-GPU. Cette décomposition permet également dans certains cas de profiter de la capacité des GPU à traiter plusieurs tâches en parallèle pour booster les performances.

Illustration du Multi Engine de DirectX 12, qui permet de traiter plusieurs files de commandes en parallèle.
C'est ce qu'AMD appelle Async Compute, bien que le terme ne soit pas correct. En effet, l'exécution asynchrone d'une tâche n'implique pas qu'elle soit traitée en concomitance d'une autre, or c'est ce dernier point qui est crucial et permet un gain de performances. Les GPU AMD profitent de multiples processeurs de commandes capables d'alimenter les unités de calcul du GPU à partir de plusieurs files différentes. Un traitement en simultané des tâches qui permet de maximiser l'utilisation de toutes les ressources du GPU : unités de calcul, bande passante mémoire etc.
Du côté de Nvidia c'est plus compliqué. Si les GeForce sont capables de prendre en charge les files copy en parallèle des files compute et graphics, traiter ces deux dernières en concomitance semble poser problème. Théoriquement les GPU Maxwell 2 (GTX 900) disposent d'un processeur de commandes capables de prendre en charge 32 files dont une peut être de type graphics. Et pourtant ce support n'est toujours pas fonctionnel en pratique, comme le démontrent par exemple les performances des GeForce dans Ashes of the Singularity.
Pourquoi ? Jusqu'ici, nous n'avons pu obtenir de réelle réponse de Nvidia. Alors bien entendu nous avons voulu profiter de la GDC pour tenter d'en savoir plus et avons questionné Nvidia lors d'un meeting organisé avec Rev Lebaredian, Senior Director GameWorks. Malheureusement pour nous, cet ingénieur qui fait partie du groupe de support technique aux développeurs de jeux vidéo avait été très bien préparé à ces questions qui concernent les spécificités du support du multi engine. Ses réponses ont au départ été mot pour mot celles de la brève déclaration officielle de Nvidia communiquée à la presse technique depuis quelques mois. A savoir "les GeForce Maxwell peuvent prendre en charge l'exécution en concomitance au niveau des SM (groupes d'unités de calcul)", "ce n'est pas encore actif dans les pilotes", "Ashes of the Singularity n'est qu'un seul jeu (pas trop important) parmi d'autres".
Une langue de bois inhabituelle qui démontre, si cela était encore nécessaire, que cette question dérange chez Nvidia. Nous avons donc changé d'approche et pour sortir de l'impasse nous avons abordé le sujet sous un angle différent : est-ce que l'Async Compute est important (pour les GPU Maxwell) ? De quoi détendre Rev Lebaredian et ouvrir la voie à une discussion bien plus intéressante. Deux arguments sont alors avancés par Nvidia.
D'une part, si Async Compute est un moyen d'augmenter les performances, ce qui compte au final ce sont les performances globales. Si les GPU GeForce sont à la base plus performants que les GPU Radeon, le recours au multi engine pour tenter de booster leurs performances n'est pas une priorité absolue.
D'autre part, si le taux d'utilisation des différents blocs des GPU GeForce est relativement élevé à la base, le gain potentiel lié à Async Compute est moins important. Nvidia précise sur ce point que globalement il y a beaucoup moins de trous (bubbles en langage GPU) au niveau de l'activité des unités de ses GPU que chez son concurrent. Or le but de l'exécution concomitante est d'exploiter une synergie dans le traitement de différentes tâches pour remplir ces "trous".
Derrière ces deux arguments avancés par Nvidia se cachent en fait celui de la bonne planification d'une architecture GPU. Intégrer dans les puces un ou des processeurs de commandes plus évolué a un coût, un coût qui peut par exemple être exploité différemment pour proposer plus d'unités de calcul et booster les performances directement et dans un maximum de jeux.
Lors du développement d'une architecture GPU, une bonne partie du travail consiste à prévoir le profil des tâches qui seront prises en charge quand les nouvelles puces seront commercialisées. L'équilibre de l'architecture entre ses différents types d'unités, entre la puissance de calcul et la bande passante mémoire, entre le débit de triangles et le débit de pixels, etc., est un point crucial qui demande une bonne visibilité, beaucoup de pragmatisme et une vision stratégique. Force est de constater que Nvidia s'en tire plutôt bien à ce niveau depuis quelques générations de GPU.
Pour illustrer cela, faisons quelques petites comparaisons entre le GM200 et Fiji sur base des résultats obtenus dans Ashes of the Singularity sans Async Compute. La comparaison est grossière et approximative (le GM200 exploité est tiré de la GTX 980 Ti qui en exploite une version légèrement castrée), mais reste intéressante :
- GM200 (GTX 980 Ti) : 6.0 fps / Gtransistors, 7.8 fps / Tflops, 142.1 fps / To/s
- Fiji (R9 Fury X) : 5.6 fps / Gtransistors, 5.8 fps / Tflops, 97.9 fps / To/s
Nous pourrions faire de même avec de nombreux jeux et le résultat serait similaire, voire encore plus marqué (AotS est particulièrement efficace sur Radeon) : le GM200 exploite mieux les ressources à sa disposition que Fiji. C'est un choix d'architecture, ce qui n'implique pas directement qu'il est meilleur qu'un autre. Augmenter le rendement de certaines unités peut avoir un coût supérieur à l'augmentation de leur nombre dans une mesure plus importante. Le travail des architectes consiste à trouver le meilleur équilibre à ce niveau.
De toute évidence, AMD a plutôt misé sur les débits bruts de ses GPU, ce qui implique en général un rendement inférieur et plus d'opportunité d'optimisation au niveau de celui-ci. Ajoutez à cela que l'organisation de l'Async Compute dans AotS semble plutôt optimiser l'utilisation du surplus de bande passante mémoire et vous comprendrez aisément qu'il y a moins à gagner du côté de Nvidia. D'autant plus que les commandes de synchronisation liées à Async Compute ont un coût qui ne sera masqué que par un gain significatif.
Si notre propre réflexion nous amène à être plutôt d'accord avec ces arguments de Nvidia, il reste un autre point important pour les joueurs et c'est probablement ce qui fait que le numéro un du GPU aborde le sujet du bout des lèvres : Async Compute apporte un gain gratuit aux utilisateurs de Radeon. Alors que cette possibilité a été prévue dans les GPU AMD depuis plus de 4 ans, ils n'ont pas pu en tirer un bénéfice commercial, ils n'ont pas été vendus plus chers pour la cause. Cela change quelque peu avec la dernière gamme d'AMD qui mise fortement sur ce point, mais, en terme de perception, les joueurs apprécient d'obtenir gratuitement un tel petit coup de boost, même s'il ne concerne qu'une poignée de jeux. A l'inverse, le rendement globalement plus élevé des GPU Nvidia a pu avoir un bénéfice immédiat dans un maximum de jeux, et a pu être pris en compte directement dans le tarif des GeForce. Et du point de vue d'une société dont le but n'est pas d'afficher des pertes, il est évident qu'une approche a plus de sens qu'une autre.
Reste que nous sommes en 2016 et que l'exploitation de l'Async Compute devrait progressivement se généraliser, notamment grâce à la similitude entre l'architecture des GPU des consoles et celle des Radeon. Nvidia ne peut donc pas totalement ignorer cette possibilité qui pourrait réduire voire supprimer son avance en termes de performances. Sans rentrer dans le moindre détail, Rev Lebaredian a ainsi tenu à réaffirmer qu'il y avait bel et bien des possibilités au niveau des pilotes pour implémenter un support qui permette de profiter dans certains cas d'un gain de performances avec l'Async Compute. Des possibilités que Nvidia réévalue en permanence, non sans oublier que ses futurs GPU pourraient changer la donne à ce niveau.
GDC: Nvidia lance le SDK GameWorks 3.1
Nvidia profite de la GDC pour lancer une évolution de son SDK GameWorks. Celui-ci passe en version 3.1 avec au menu 3 nouvelles techniques de rendu ainsi que 2 nouveaux modules de simulation PhysX.

Avec GameWorks 3.1, les effets d'ombres et de lumières sont à l'honneur et de nouveaux modules graphiques sont proposés par Nvidia en vue d'une intégration par les développeurs de jeux vidéo :
- Volumetric Lighting : une nouvelle technique d'éclairage volumétrique qui permet de représenter le passage de la lumière à travers l'atmosphère
- Hybrid Frustum Traced Shadows (HFTS) : évolution du Percentage-Closer Soft Shadows PCSS) qui permet une évolution naturelle des ombres dures vers les ombres douces
- Voxel Accelerated Ambiant Occlusion (VXAO) : nouvelle technique d'approximation de l'occultation ambiante pour apporter de la profondeur et du réalisme à la scène 3D
Nous vous donnerons plus de détails sur ces effets graphiques plus tard dans la semaine, Nvidia ayant posé un embargo qui prendra fin après les présentations techniques de ces effets à la GDC. A noter que le HFTS est déjà proposé dans The Division alors que le récent patch de Rise of the Tomb Raider vient d'y ajouter le support du VXAO en mode DirectX 11.
Du côté de PhysX, Nvidia propose deux nouveaux modules en versions betas. Tout d'abord PhysX-GRB, une implémentation plus avancée de la prise en charge des corps rigides. Cette approche hybride qui exploite CPU et GPU est annoncée comme capable d'améliorer les performances d'un facteur x6. Ensuite Nvidia propose Flow, un algorithme qui simule et traite le rendu des fluides combustibles tels que le feu et la fumée sans devoir les restreindre à un espace limité.
Parallèlement à l'annonce de ces nouveautés, Nvidia tient à réinsister sur le fait que le but premier de GameWorks est d'aider les développeurs à produire de meilleurs jeux et à proposer la meilleure expérience possible sur GeForce. Régulièrement critiqué sur ce point, GameWorks est également un outil stratégique important pour Nvidia, qui peut lui permettre de dégager un avantage compétitif.
Probablement pour apaiser ces critiques, mais sans doute suite à une demande des développeurs qui apprécient l'ouverture prônée par AMD avec GPUOpen, Nvidia change quelque peu son fusil d'épaule en allant vers plus d'ouverture pour ses modules GameWorks. Le code source de certains d'entre eux sera ainsi progressivement rendu disponible sur GitHub. Les modules Volumetric Lighting et Faceworks sont les premiers à être disponibles alors que HairWorks, HBAO+ et WaveWorks y seront proposés sous peu. Une évolution que l'on ne peut que saluer.