
Les derniers contenus liés aux tags Maxwell et GDC
GDC: Nvidia parle du Tile Caching de Maxwell et Pascal
GDC: VR: Nvidia Multi-Res Shading en pratique
GDC: Async Compute : ce qu'en dit Nvidia
GDC: D3D12: Une guerre des specs en vue ?
GDC: Nvidia parle du Tile Caching de Maxwell et Pascal



En parallèle de la GDC et lors de la présentation à la presse de la GeForce GTX 1080 Ti, Nvidia a communiqué officiellement pour la première fois au sujet d'une optimisation introduite depuis les GPU Maxwell : le Tile Caching.
Cet été, David Kanter de real world technologies avait mis en évidence un comportement étrange pour les GPU Maxwell et Pascal. Avec ceux-ci, la rastérisation de plusieurs triangles progressait par blocs plus ou moins petits de l'image (appelés tiles en anglais) et non pas strictement triangle par triangle. Contrairement à certaines analyses, nous étions alors sceptiques par rapport au rapprochement qui était fait avec le tile based rendering (TBR) ou tile based deffered rendering (TBDR) des GPU mobiles Adreno, Mali ou PowerVR. Ces modes de rendu sont peu efficaces avec une géométrie complexe et posent problème avec certaines techniques de rendu avancées. Des contraintes qui sont incompatibles avec un GPU haut de gamme destiné au PC. Nous estimions alors qu'il s'agissait d'une optimisation opportuniste spécifique à certaines situations.
Face à ces discussions et à l'introduction par AMD d'une approche similaire, voire identique, Nvidia vient de clarifier le fonctionnement de la rastérisation sur ses GPU Maxwell et Pascal. Ce qui commence par lui donner un nom : le Tile Caching.
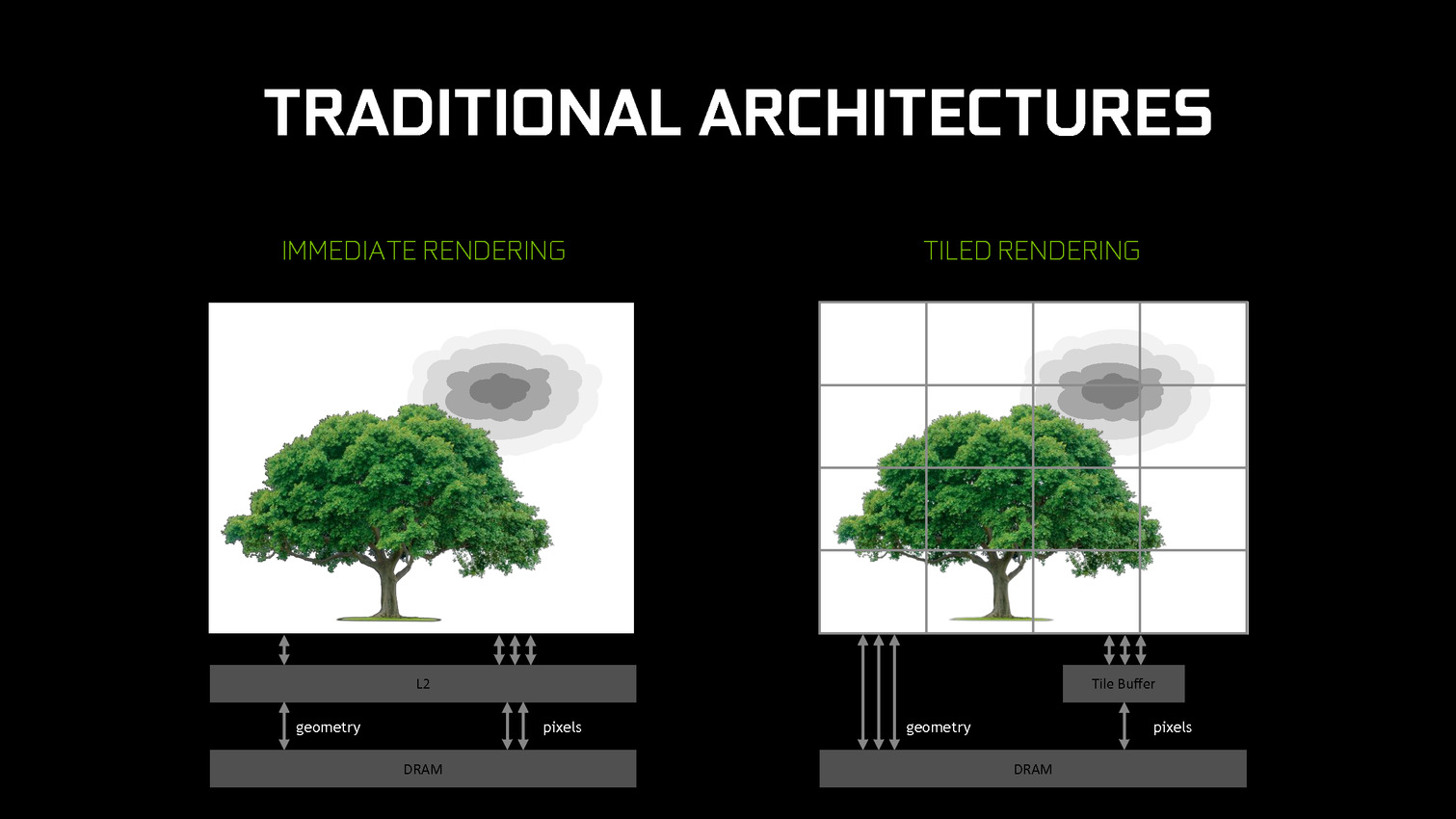
Traditionnellement, les GPU d'AMD et de Nvidia fonctionnent suivant le principe du rendu immédiat. Un triangle est pris en charge, il est découpé en pixels, les pixels sont écrits en mémoire. Si un second triangle traité par la suite se trouve entre le premier et la caméra, des pixels auront inutilement été calculés et écrits en mémoire. Différentes approches sont utilisées pour éviter ce gaspillage de ressources, mais il reste en partie présent.
De leur côté, les GPU mobiles font appel au TBR/TBDR qui fonctionne en deux passes. La première consiste à traiter toute la géométrie et à la récrire en mémoire en la réorganisant de manière à savoir quels triangles sont présents chaque bloc de l'image. Lors d'une seconde passe, ces triangles sont envoyés vers le moteur de rastérisation tile par tile (avec tri de visibilité dans le cas du TBDR). La construction de l'image dans de petites tiles en cache fait que les pixels ne seront écrits qu'une seule fois en mémoire. Cela revient à utiliser plus de bande passante pour la géométrie mais moins pour les pixels. Un compromis dont l'intérêt dépend évidemment du ratio entre la charge sur ces deux points.
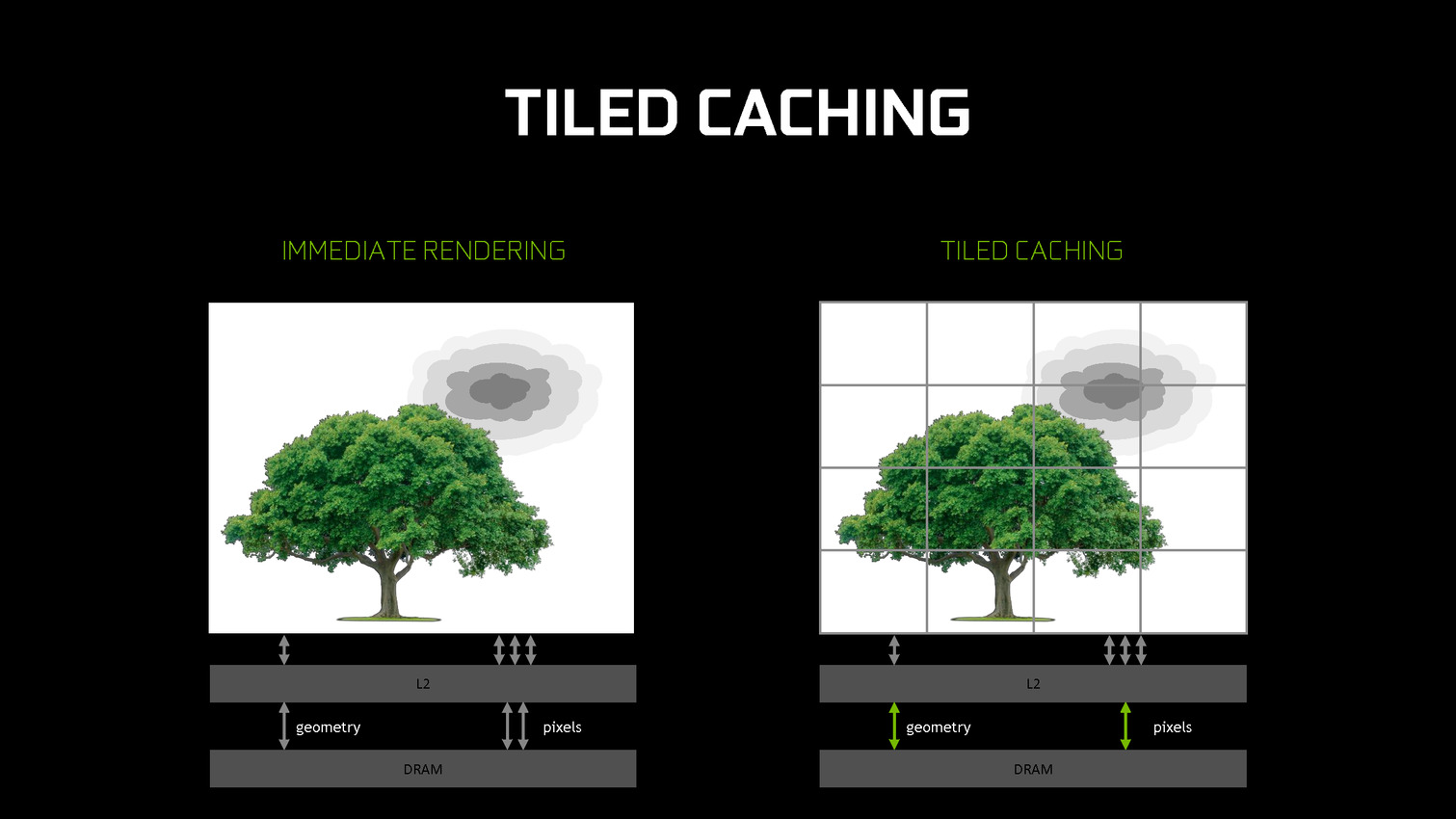
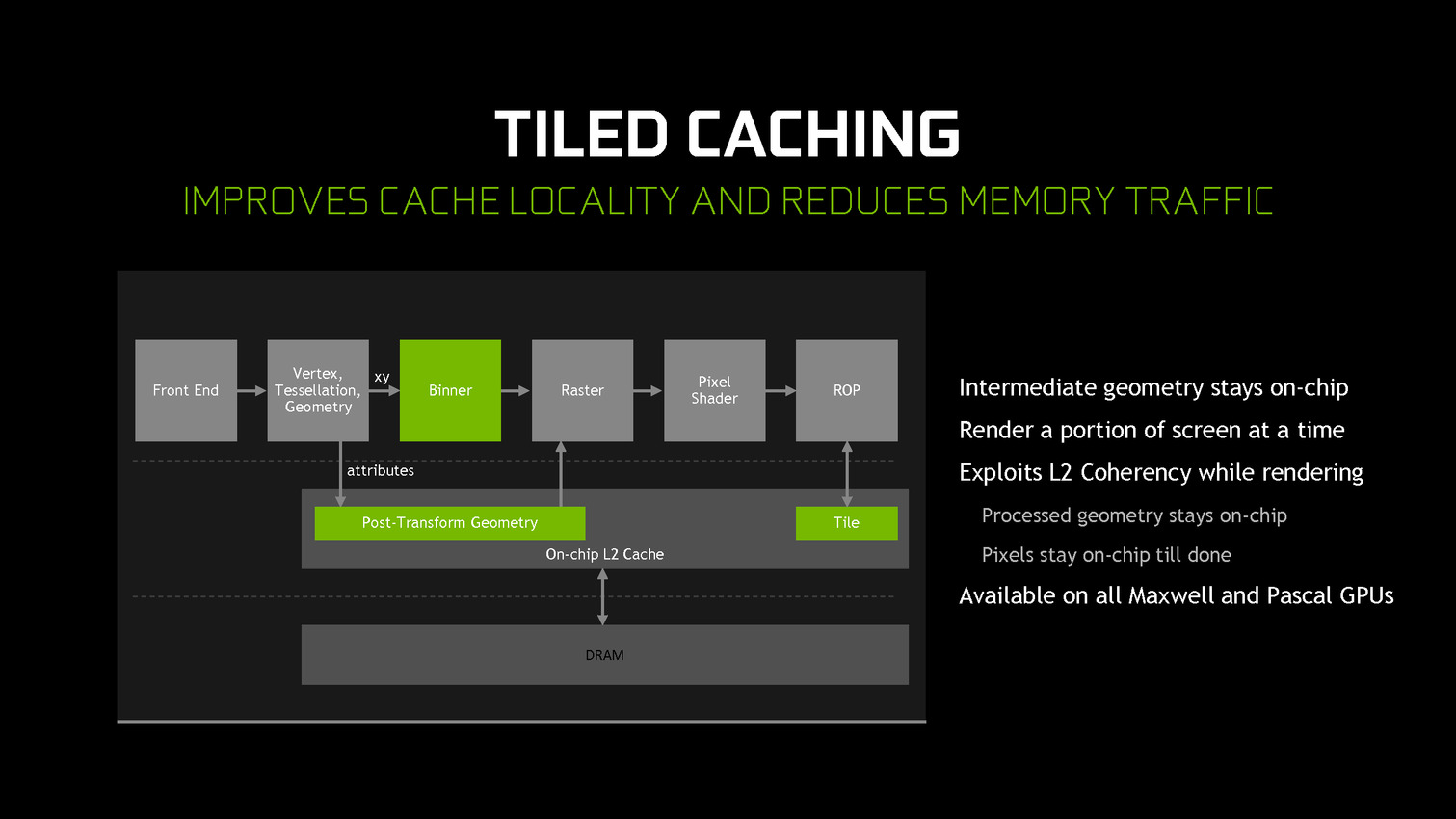
A partir des GPU Maxwell, Nvidia a cherché à pouvoir bénéficier d'une partie des avantages de cette seconde approche sans perdre la flexibilité du rendu immédiat. C'est le Tile Caching qui peut être vu comme un "rendu avec rastérisation retardée". Une fois un triangle traité, au lieu de l'envoyer vers le moteur de rastérisation, Nvidia le conserve en cache interne, ainsi que tous ses paramètres. Quand ce cache est rempli, la rastérisation peut débuter. Grossièrement, il s'agit d'interrompre le rendu et d'attendre d'avoir un plus d'informations (mais pas toutes) avant de le poursuivre plus efficacement.
Une petite unité fixe supplémentaire, appelée binner, se charge de suivre la position et la couverture de chaque triangle en cache. Quand le temps de leur rastérisation est arrivé, parmi ces quelques triangles, le GPU sait lesquels seront assurément et totalement masqués. L'inverse n'est par contre pas vrai puisque, contrairement au TBR/TBDR, tous les triangles n'ont pas été traités en amont, juste quelques-uns. Il s'agit d'une optimisation localisée et opportuniste plus que d'un changement de philosophie global pour ces GPU.
Cette approche permet de traiter la rastérisation par tile et non pas par triangle. Il y a un surcoût au niveau de la rastérisation (même si Nvidia profite probablement de son moteur de projection multiple pour le limiter) mais ces tiles peuvent rester en cache. Elles ne sont alors écrites en mémoire que quand que tous les triangles en cache et qui y sont visibles ont été traités. Contrairement au TBR/TBDR, ces tiles seront réécrites en mémoire plusieurs fois lorsque d'autres morceaux de géométrie qui les parcourent seront traités.
Nvidia nous précise qu'aucun cache spécifique n'a été implémenté et que c'est le cache L2 qui est exploité. C'est la raison pour laquelle il a fait un bond énorme en taille à partir des GPU Maxwell (1 voire 2 Mo par 128-bit de bus contre 256 Ko sur Kepler). Un système d'optimisation automatique à base d'heuristiques a été mis en place pour opter pour la taille la plus adaptée au niveau du buffer de triangle et des tiles, mais Nvidia peut configurer tout cela manuellement pour chaque jeu ou débrayer le Tile Caching s'il est contreproductif.
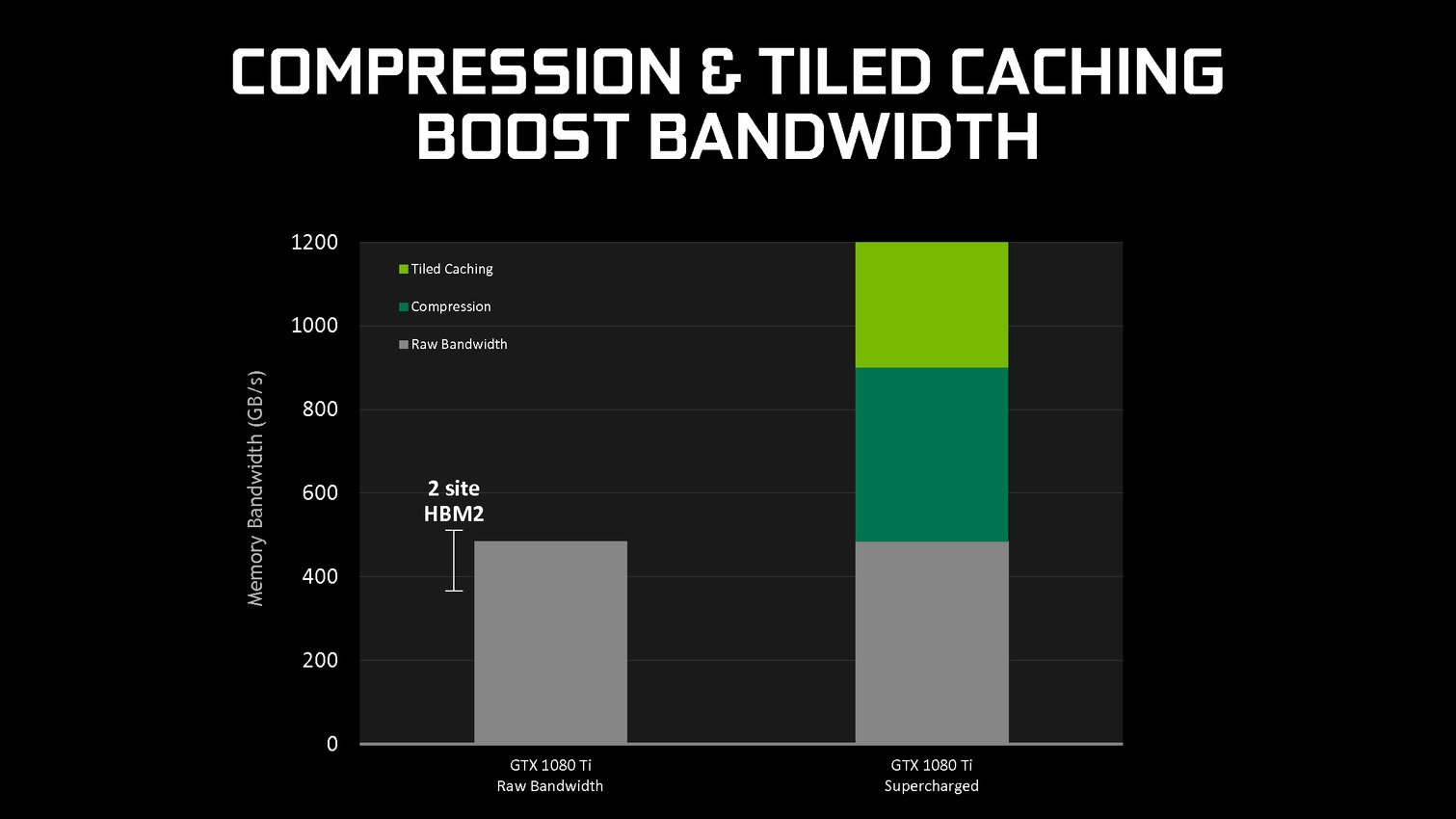
En se contentant de chercher des opportunités d'optimisation locales, par morceau de géométrie, Nvidia parvient à obtenir des gains sympathiques, certes inférieurs à ceux obtenus par une architecture purement TBR/TBDR, mais qui permettent de conserver plus de flexibilité et de performances dans un maximum de situations. C'est un des piliers de l'excellente efficacité des GPU Maxwell et Pascal. Cela fait également partie d'une stratégie réfléchie qui consiste à chercher à créer de la valeur au niveau de ses propres puces plutôt que via l'exploitation d'une mémoire plus onéreuse (bus 512-bit, HBM ).
GDC: VR: Nvidia Multi-Res Shading en pratique
Nous avons profité de la GDC pour revenir sur une technique introduite par Nvidia il y a quelques mois pour booster les performances de la réalité virtuelle. Baptisée Multi-Resolution Shading, elle consiste à réduire la résolution au niveau des zones visuelles périphériques et donc le nombre de pixels réellement rendus. Un subterfuge plutôt convainquant en pratique.
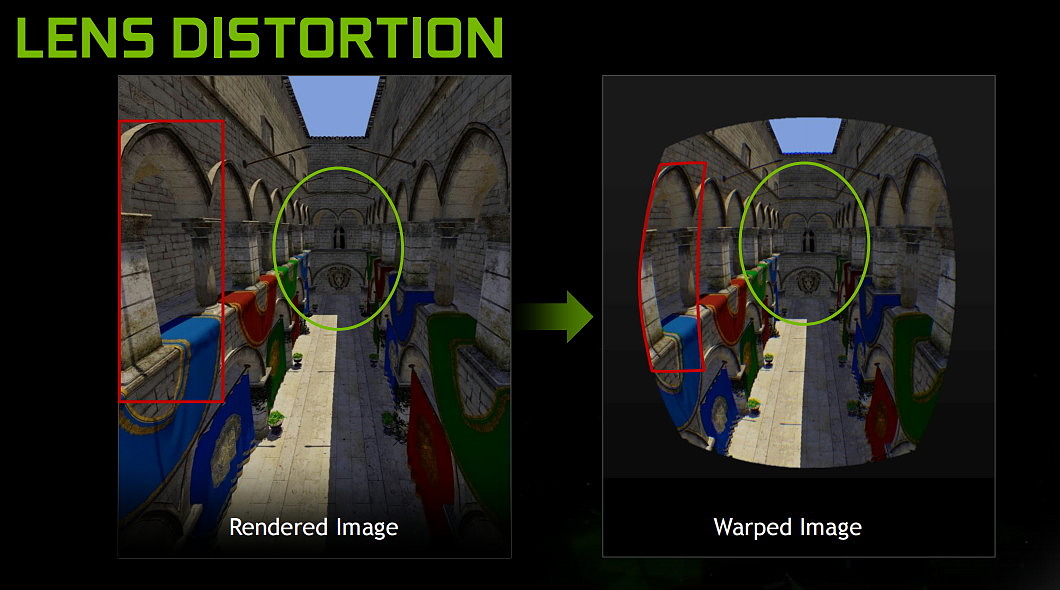
Pour pouvoir afficher une image sur un casque de réalité virtuelle, elle doit être déformée pour permettre, avec la lentille, de proposer l'angle de vue correct. Ce procédé, appelé warping et illustré ci-dessus, implique que seul le centre de l'image conserve la pleine résolution. Les zones périphériques représentent au final moins de pixels que le GPU n'en a calculés. En d'autres termes, elles reçoivent automatiquement une dose plus ou moins élevée de supersampling alors que ce n'est pas là que se pose notre regard. Un gaspillage de ressources que Nvidia tente de réduire avec le Multi-Res Shading.
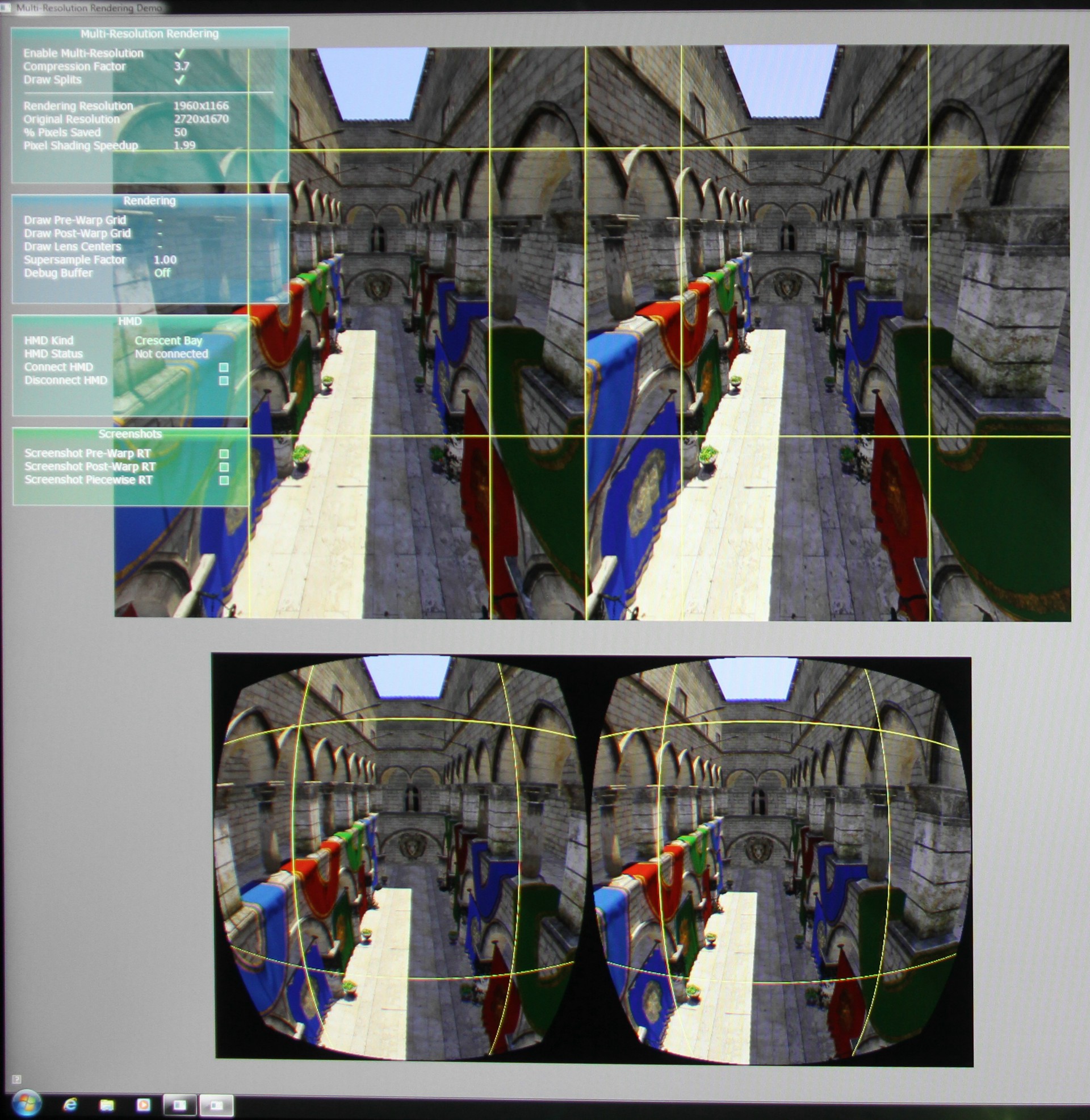
La démonstration de Nvidia permet d'activer et désactiver le Multi-Res Shading à loisir, de quoi pouvoir essayer de discerner les différences éventuelles. Et force est de constater que même en ayant conscience de l'activation de cette optimisation il est difficile d'en discerner les effets. Il faut savoir exactement où regarder et déplacer le regard vers les coins de l'image (ce que nous ne sommes pas censés faire avec un casque de VR) pour observer une légère différence.
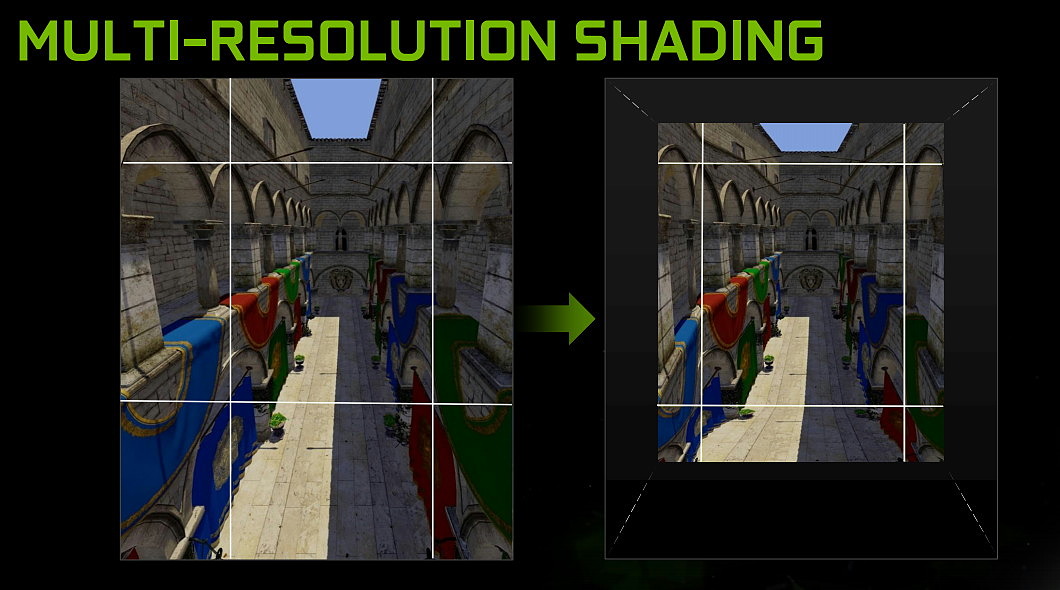
Comme vous pouvez l'observer sur les illustrations ci-dessus, Nvidia a recours à 9 viewports de résolutions différentes. Par exemple, la résolution peut être réduite à 1/2 sur les côtés et à 1/4 dans les coins. Mais si le principe est simple, l'exécution est un peu plus complexe et profite du multi-projection engine des GPU Maxwell 2 pour projeter rapidement, en une seule passe, tous les triangles dans chacun des 9 viewports. Sans cette capacité matérielle (également exploitée pour le VXGI et le VXAO), le coût sur les performances serait important à prohibitif suivant la complexité de la scène. AMD nous a d'ailleurs confirmé que cette technique n'était pas réaliste pour ses GPU, tout en précisant essayer d'obtenir un résultat similaire via d'autres approches.
Le Multi-Res Shasing est proposé par Nvidia aux développeurs à travers le SDK VR Works mais a également été implémenté dans l'Unreal Engine il y a quelques mois et, à l'occasion de la GDC, Unity a suivi le mouvement en annonçant son intégration, avec le reste de la suite VR de Nvidia.
GDC: Async Compute : ce qu'en dit Nvidia
Nous avons bien entendu profité de la GDC pour questionner Nvidia en vue d'en apprendre plus sur ce dont sont capables ses GPU en terme de prise en charge du multi engine de DirectX 12 sans réel succès ?
Au coeur de DirectX 12, cette fonctionnalité permet de décomposer le rendu en plusieurs files de commandes, qui peuvent être de type copy, compute ou graphics, et de gérer la synchronisation entre ces files. De quoi permettre aux développeurs de prendre le contrôle sur l'ordre dans lequel les tâches sont exécutées ou encore de piloter directement le multi-GPU. Cette décomposition permet également dans certains cas de profiter de la capacité des GPU à traiter plusieurs tâches en parallèle pour booster les performances.

Illustration du Multi Engine de DirectX 12, qui permet de traiter plusieurs files de commandes en parallèle.
C'est ce qu'AMD appelle Async Compute, bien que le terme ne soit pas correct. En effet, l'exécution asynchrone d'une tâche n'implique pas qu'elle soit traitée en concomitance d'une autre, or c'est ce dernier point qui est crucial et permet un gain de performances. Les GPU AMD profitent de multiples processeurs de commandes capables d'alimenter les unités de calcul du GPU à partir de plusieurs files différentes. Un traitement en simultané des tâches qui permet de maximiser l'utilisation de toutes les ressources du GPU : unités de calcul, bande passante mémoire etc.
Du côté de Nvidia c'est plus compliqué. Si les GeForce sont capables de prendre en charge les files copy en parallèle des files compute et graphics, traiter ces deux dernières en concomitance semble poser problème. Théoriquement les GPU Maxwell 2 (GTX 900) disposent d'un processeur de commandes capables de prendre en charge 32 files dont une peut être de type graphics. Et pourtant ce support n'est toujours pas fonctionnel en pratique, comme le démontrent par exemple les performances des GeForce dans Ashes of the Singularity.
Pourquoi ? Jusqu'ici, nous n'avons pu obtenir de réelle réponse de Nvidia. Alors bien entendu nous avons voulu profiter de la GDC pour tenter d'en savoir plus et avons questionné Nvidia lors d'un meeting organisé avec Rev Lebaredian, Senior Director GameWorks. Malheureusement pour nous, cet ingénieur qui fait partie du groupe de support technique aux développeurs de jeux vidéo avait été très bien préparé à ces questions qui concernent les spécificités du support du multi engine. Ses réponses ont au départ été mot pour mot celles de la brève déclaration officielle de Nvidia communiquée à la presse technique depuis quelques mois. A savoir "les GeForce Maxwell peuvent prendre en charge l'exécution en concomitance au niveau des SM (groupes d'unités de calcul)", "ce n'est pas encore actif dans les pilotes", "Ashes of the Singularity n'est qu'un seul jeu (pas trop important) parmi d'autres".
Une langue de bois inhabituelle qui démontre, si cela était encore nécessaire, que cette question dérange chez Nvidia. Nous avons donc changé d'approche et pour sortir de l'impasse nous avons abordé le sujet sous un angle différent : est-ce que l'Async Compute est important (pour les GPU Maxwell) ? De quoi détendre Rev Lebaredian et ouvrir la voie à une discussion bien plus intéressante. Deux arguments sont alors avancés par Nvidia.
D'une part, si Async Compute est un moyen d'augmenter les performances, ce qui compte au final ce sont les performances globales. Si les GPU GeForce sont à la base plus performants que les GPU Radeon, le recours au multi engine pour tenter de booster leurs performances n'est pas une priorité absolue.
D'autre part, si le taux d'utilisation des différents blocs des GPU GeForce est relativement élevé à la base, le gain potentiel lié à Async Compute est moins important. Nvidia précise sur ce point que globalement il y a beaucoup moins de trous (bubbles en langage GPU) au niveau de l'activité des unités de ses GPU que chez son concurrent. Or le but de l'exécution concomitante est d'exploiter une synergie dans le traitement de différentes tâches pour remplir ces "trous".
Derrière ces deux arguments avancés par Nvidia se cachent en fait celui de la bonne planification d'une architecture GPU. Intégrer dans les puces un ou des processeurs de commandes plus évolué a un coût, un coût qui peut par exemple être exploité différemment pour proposer plus d'unités de calcul et booster les performances directement et dans un maximum de jeux.
Lors du développement d'une architecture GPU, une bonne partie du travail consiste à prévoir le profil des tâches qui seront prises en charge quand les nouvelles puces seront commercialisées. L'équilibre de l'architecture entre ses différents types d'unités, entre la puissance de calcul et la bande passante mémoire, entre le débit de triangles et le débit de pixels, etc., est un point crucial qui demande une bonne visibilité, beaucoup de pragmatisme et une vision stratégique. Force est de constater que Nvidia s'en tire plutôt bien à ce niveau depuis quelques générations de GPU.
Pour illustrer cela, faisons quelques petites comparaisons entre le GM200 et Fiji sur base des résultats obtenus dans Ashes of the Singularity sans Async Compute. La comparaison est grossière et approximative (le GM200 exploité est tiré de la GTX 980 Ti qui en exploite une version légèrement castrée), mais reste intéressante :
- GM200 (GTX 980 Ti) : 6.0 fps / Gtransistors, 7.8 fps / Tflops, 142.1 fps / To/s
- Fiji (R9 Fury X) : 5.6 fps / Gtransistors, 5.8 fps / Tflops, 97.9 fps / To/s
Nous pourrions faire de même avec de nombreux jeux et le résultat serait similaire, voire encore plus marqué (AotS est particulièrement efficace sur Radeon) : le GM200 exploite mieux les ressources à sa disposition que Fiji. C'est un choix d'architecture, ce qui n'implique pas directement qu'il est meilleur qu'un autre. Augmenter le rendement de certaines unités peut avoir un coût supérieur à l'augmentation de leur nombre dans une mesure plus importante. Le travail des architectes consiste à trouver le meilleur équilibre à ce niveau.
De toute évidence, AMD a plutôt misé sur les débits bruts de ses GPU, ce qui implique en général un rendement inférieur et plus d'opportunité d'optimisation au niveau de celui-ci. Ajoutez à cela que l'organisation de l'Async Compute dans AotS semble plutôt optimiser l'utilisation du surplus de bande passante mémoire et vous comprendrez aisément qu'il y a moins à gagner du côté de Nvidia. D'autant plus que les commandes de synchronisation liées à Async Compute ont un coût qui ne sera masqué que par un gain significatif.
Si notre propre réflexion nous amène à être plutôt d'accord avec ces arguments de Nvidia, il reste un autre point important pour les joueurs et c'est probablement ce qui fait que le numéro un du GPU aborde le sujet du bout des lèvres : Async Compute apporte un gain gratuit aux utilisateurs de Radeon. Alors que cette possibilité a été prévue dans les GPU AMD depuis plus de 4 ans, ils n'ont pas pu en tirer un bénéfice commercial, ils n'ont pas été vendus plus chers pour la cause. Cela change quelque peu avec la dernière gamme d'AMD qui mise fortement sur ce point, mais, en terme de perception, les joueurs apprécient d'obtenir gratuitement un tel petit coup de boost, même s'il ne concerne qu'une poignée de jeux. A l'inverse, le rendement globalement plus élevé des GPU Nvidia a pu avoir un bénéfice immédiat dans un maximum de jeux, et a pu être pris en compte directement dans le tarif des GeForce. Et du point de vue d'une société dont le but n'est pas d'afficher des pertes, il est évident qu'une approche a plus de sens qu'une autre.
Reste que nous sommes en 2016 et que l'exploitation de l'Async Compute devrait progressivement se généraliser, notamment grâce à la similitude entre l'architecture des GPU des consoles et celle des Radeon. Nvidia ne peut donc pas totalement ignorer cette possibilité qui pourrait réduire voire supprimer son avance en termes de performances. Sans rentrer dans le moindre détail, Rev Lebaredian a ainsi tenu à réaffirmer qu'il y avait bel et bien des possibilités au niveau des pilotes pour implémenter un support qui permette de profiter dans certains cas d'un gain de performances avec l'Async Compute. Des possibilités que Nvidia réévalue en permanence, non sans oublier que ses futurs GPU pourraient changer la donne à ce niveau.
GDC: D3D12: Une guerre des specs en vue ?
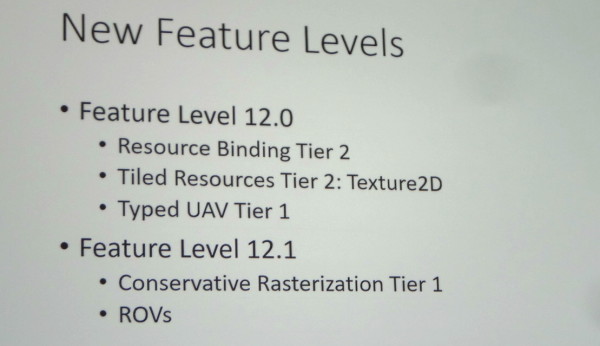
Comme nous l'expliquions il y a peu, Microsoft a dévoilé à la GDC les 2 nouveaux niveaux de fonctionnalités de Direct3D 12 : 12_0 et 12_1. Mais d'autres segmentations plus subtiles existent, de quoi nous laisser penser que les départements communications d'AMD et de Nvidia pourraient se battre à coups de niveaux de support de DirectX 12.
De toute évidence, Microsoft avait demandé à AMD et Nvidia de ne pas lancer de polémique à la GDC sur le niveau de support des spécifications de Direct3D 12 de leurs GPU. Il n'y a ainsi eu aucune communication officielle à ce sujet mais nous avons pu gratter quelques détails lors de discussions informelles ou en posant des questions à la fin des différentes sessions.
Tout d'abord, nous pouvons confirmer que les GeForce Maxwell de seconde génération (GTX Titan X, 980, 970 et 960) supportent bien le niveau de fonctionnalité le plus élevé : 12_1. Il a de toute évidence été modelé d'après les spécifications de l'architecture de Nvidia. Nous ne savons par contre toujours pas s'il existe des GPU actuellement commercialisés de niveau 12_0.
Cela ne veut pas dire pour autant que les dernières GeForce GTX supportent la totalité des possibilités de Direct3D 12. Ainsi, en plus des niveaux de fonctionnalités, des niveaux de support appelés Tiers existent pour différents points.
Le principal concerne les capacités de gestion des différentes ressources (Resource Binding) qui augmente en passant du Tier 1 au Tier 2 et atteint un niveau presqu'illimité au Tier 3. Microsoft a précisé que sur base des dernières statistiques de Steam, et en ne prenant en compte que le matériel compatible avec Direct3D 12, 39% du parc installé est limité au Tier 1, 44% au Tier 2 et 17% supporte le Tier 3. Mais quel GPU supporte quel Tier ?

Selon nos informations, les GPU Maxwell sont en fait limités au Tier 2, qui est nécessaire au support des niveaux 12_0 et 12_1 et qui a probablement lui aussi été modelé autour de leurs capacités. Une des différences les plus importantes avec le Tier 3 concerne la gestion des Constant Buffer Views (CBV) : ceux-ci ne sont pas virtualisés et sont limités en nombre à 14. Il est probable que l'architecture Maxwell soit capable de virtualiser les CBV, mais que l'implémentation logicielle/matérielle de Nvidia profite d'un mode plus performant avec une gestion "fixe" des Constant Buffers. Un compromis qui limite quelque peu la flexibilité accordée aux développeurs pour s'assurer que les GPU GeForce restent dans un mode optimal sur le plan des performances.
Mais alors à qui correspond les 17% de GPU compatibles Tier 3 ? Toujours selon nos informations, il s'agit des Radeon de type GCN qui profitent d'une architecture très flexible à ce niveau. D'un côté les GeForce GTX 900 supportent le niveau 12_1, d'un autre les Radeon R9 200 supportent le Resource Binding Tier 3. Un combat de spécifications en perspective ? Difficile pour AMD d'attaquer les GTX 900 sur base de cela pour l'instant mais cela risque de changer avec Fiji. Si ce futur GPU supporte le niveau 12_1 et le Tier 3, nul doute que vous en entendrez parler ! Si par contre Fiji est limité au niveau 12_0 et Tier 3, chacun devra préparer ses arguments.
Au final, voici comment le support des Resource Binding Tiers est de toute évidence réparti sur PC :
Tier 1 : Nvidia Fermi, Intel Haswell et Broadwell
Tier 2 : Nvidia Kepler et Maxwell 1/2
Tier 3 : AMD GCN
A noter que pour les fonctionnalités spécifiques au niveau 12_1, les Raster Ordered Views et la Conservative Rasterization, il existe également des Tiers 1 et 2 dont les spécificités nous sont pour l'heure inconnues. L'implémentation de Nvidia se limiterait au Tier 1 et il pourrait être possible là aussi pour AMD d'essayer de se démarquer. Affaire à suivre.